-
Baisch,
Ozcan,
Goldberg,
Ithier & Wood
(2014)
-
Baisch,
A.,
Ozcan,
O.,
Goldberg,
B.,
Ithier,
D. & Wood,
R.
(2014).
High speed locomotion for a quadrupedal microrobot.
The International Journal of Robotics Research.
https://doi.org/10.1177/0278364914521473
-
Birkmeyer,
Peterson & Fearing
(2009)
-
Birkmeyer,
P.,
Peterson,
K. & Fearing,
R.
(2009).
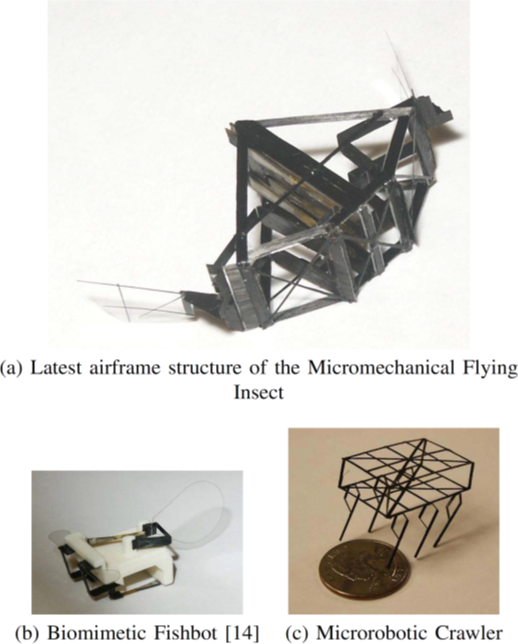
DASH: A dynamic 16g hexapedal robot.
2009 IEEE/RSJ International Conference on Intelligent Robots and Systems. 2683–2689.
https://doi.org/10.1109/IROS.2009.5354561
-
Buchner
(2004)
-
Buchner,
T.
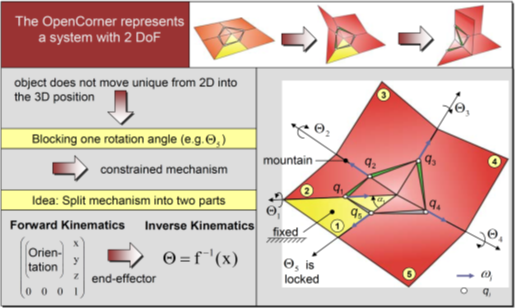
(2004).
Kinematics of 3D Folding Structures for Nanostructured Origami. Retrieved from
-
Fearing,
Chiang,
Dickinson,
Pick,
Sitti & Yan
(2000)
-
Fearing,
R.,
Chiang,
K.,
Dickinson,
M.,
Pick,
D.,
Sitti,
M. & Yan,
J.
(2000).
Wing transmission for a micromechanical flying insect.
IEEE.
https://doi.org/10.1109/ROBOT.2000.844811
-
Felton,
Tolley,
Shin,
Onal,
Demaine,
Rus & Wood
(2013)
-
Felton,
S.,
Tolley,
M.,
Shin,
B.,
Onal,
C.,
Demaine,
E.,
Rus,
D. & Wood,
R.
(2013).
Self-folding with shape memory composites.
Soft Matter, 9(32). 7688.
https://doi.org/10.1039/c3sm51003d
-
Felton,
Tolley,
Demaine,
Rus & Wood
(2014)
-
Felton,
S.,
Tolley,
M.,
Demaine,
E.,
Rus,
D. & Wood,
R.
(2014).
A method for building self-folding machines.
Science, 345(6197). 644–646.
https://doi.org/10.1126/science.1252610
-
Firouzeh & Paik
(2015)
-
Firouzeh,
A. & Paik,
J.
(2015).
Robogami: A Fully Integrated Low-Profile Robotic Origami.
Journal of Mechanisms and Robotics, 7(2). 021009.
https://doi.org/10.1115/1.4029491
-
Haldane,
Peterson,
Garcia Bermudez & Fearing
(2013)
-
Haldane,
D.,
Peterson,
K.,
Garcia Bermudez,
F. & Fearing,
R.
(2013).
Animal-inspired design and aerodynamic stabilization of a hexapedal millirobot.
IEEE.
https://doi.org/10.1109/ICRA.2013.6631034
-
Hawkes,
An,
Benbernou,
Tanaka,
Kim,
Demaine,
Rus & Wood
(2010)
-
Hawkes,
E.,
An,
B.,
Benbernou,
N.,
Tanaka,
H.,
Kim,
S.,
Demaine,
E.,
Rus,
D. & Wood,
R.
(2010).
Programmable matter by folding.
Proceedings of the National Academy of Sciences, 107(28). 12441–12445.
https://doi.org/10.1073/pnas.0914069107
-
Hoover & Fearing
(2008)
-
Hoover,
A. & Fearing,
R.
(2008).
Fast scale prototyping for folded millirobots.
2008 IEEE International Conference on Robotics and Automation. 1777–1778.
https://doi.org/10.1109/ROBOT.2008.4543462
-
Hoover,
Burden,
Shankar Sastry & Fearing
(2010)
-
Hoover,
A.,
Burden,
S.,
Shankar Sastry,
S. & Fearing,
R.
(2010).
Bio-inspired design and dynamic maneuverability of a minimally actuated six-legged robot.
IEEE.
https://doi.org/10.1109/BIOROB.2010.5626034
-
Karras,
Fuller,
Carpenter,
Buscicchio,
McKeeby,
Norman,
Parcheta,
Davydychev & Fearing
(2017)
-
Karras,
J.,
Fuller,
C.,
Carpenter,
K.,
Buscicchio,
A.,
McKeeby,
D.,
Norman,
C.,
Parcheta,
C.,
Davydychev,
I. & Fearing,
R.
(2017).
Pop-up mars rover with textile-enhanced rigid-flex PCB body.
IEEE.
https://doi.org/10.1109/ICRA.2017.7989642
-
Koh & Cho
(2013)
-
Koh,
J. & Cho,
K.
(2013).
Omega-Shaped Inchworm-Inspired Crawling Robot With Large-Index-and-Pitch (LIP) SMA Spring Actuators.
IEEE/ASME Transactions on Mechatronics, 18(2). 419–429.
https://doi.org/10.1109/TMECH.2012.2211033
-
Kohut,
Zarrouk,
Peterson & Fearing
(2013)
-
Kohut,
N.,
Zarrouk,
D.,
Peterson,
K. & Fearing,
R.
(2013).
Aerodynamic steering of a 10 cm high-speed running robot.
IEEE.
https://doi.org/10.1109/IROS.2013.6697167
-
Lee,
Kim,
Kim,
Park & Cho
(2013)
-
Lee,
D.,
Kim,
J.,
Kim,
S.,
Park,
J. & Cho,
K.
(2013).
Design of Deformable-Wheeled Robot Based on Origami Structure with Shape Memory Alloy Coil Spring.
-
Lee,
Jung,
Sin,
Ahn & Cho
(2013)
-
Lee,
D.,
Jung,
G.,
Sin,
M.,
Ahn,
S. & Cho,
K.
(2013).
Deformable wheel robot based on origami structure.
IEEE.
https://doi.org/10.1109/ICRA.2013.6631383
-
Li,
Vogt,
Rus & Wood
(2017)
-
Li,
S.,
Vogt,
D.,
Rus,
D. & Wood,
R.
(2017).
Fluid-driven origami-inspired artificial muscles.
Proceedings of the National Academy of Sciences, 114(50). 201713450.
https://doi.org/10.1073/pnas.1713450114
-
McClintock,
Temel,
Doshi,
Koh & Wood
(2018)
-
McClintock,
H.,
Temel,
F.,
Doshi,
N.,
Koh,
J. & Wood,
R.
(2018).
The milliDelta: A high-bandwidth, high-precision, millimeter-scale Delta robot.
Science Robotics, 3(14). eaar3018.
https://doi.org/10.1126/scirobotics.aar3018
-
Miyashita,
Guitron,
Ludersdorfer,
Sung & Rus
(2015)
-
Miyashita,
S.,
Guitron,
S.,
Ludersdorfer,
M.,
Sung,
C. & Rus,
D.
(2015).
An Untethered Miniature Origami Robot that Self-folds , Walks , Swims , and Degrades. 1490–1496.
https://doi.org/10.1109/ICRA.2015.7139386
-
Mulgaonkar,
Araki,
Koh,
Guerrero-Bonilla,
Aukes,
Makineni,
Tolley,
Rus,
Wood & Kumar
(2016)
-
Mulgaonkar,
Y.,
Araki,
B.,
Koh,
J.,
Guerrero-Bonilla,
L.,
Aukes,
D.,
Makineni,
A.,
Tolley,
M.,
Rus,
D.,
Wood,
R. & Kumar,
V.
(2016).
The Flying Monkey: A Mesoscale Robot That Can Run, Fly, And Grasp.
IEEE.
https://doi.org/10.1109/ICRA.2016.7487667
-
Overvelde,
Weaver,
Hoberman & Bertoldi
(2017)
-
Overvelde,
J.,
Weaver,
J.,
Hoberman,
C. & Bertoldi,
K.
(2017).
Rational design of reconfigurable prismatic architected materials.
Nature, 541(7637). 347–352.
https://doi.org/10.1038/nature20824
-
Peterson & Fearing
(2011)
-
Peterson,
K. & Fearing,
R.
(2011).
Experimental dynamics of wing assisted running for a bipedal ornithopter.
IEEE International Conference on Intelligent Robots and Systems. 5080–5086.
https://doi.org/10.1109/IROS.2011.6048800
-
Peterson,
Birkmeyer,
Dudley & Fearing
(2011)
-
Peterson,
K.,
Birkmeyer,
P.,
Dudley,
R. & Fearing,
R.
(2011).
A wing-assisted running robot and implications for avian flight evolution.
Bioinspiration and Biomimetics, 6(4).
https://doi.org/10.1088/1748-3182/6/4/046008
-
Sahai,
Lee & Fearing
(2003)
-
Sahai,
R.,
Lee,
J. & Fearing,
R.
(2003).
Semi-automated micro assembly for rapid prototyping of a one DOF surgical wrist.
Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), 2(October).
https://doi.org/10.1109/IROS.2003.1248918
-
Sahai,
Avadhanula,
Groff,
Steltz,
Wood & Fearing
(2006)
-
Sahai,
R.,
Avadhanula,
S.,
Groff,
R.,
Steltz,
E.,
Wood,
R. & Fearing,
R.
(2006).
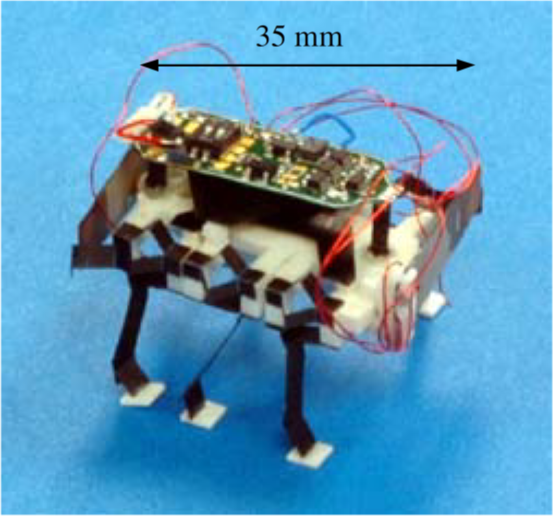
Towards a 3g crawling robot through the integration of microrobot technologies.
Proceedings - IEEE International Conference on Robotics and Automation, 2006. 296–302.
https://doi.org/10.1109/ROBOT.2006.1641727
-
Schulz,
Sung,
Spielberg,
Zhao,
Cheng,
Grinspun,
Rus & Matusik
(2017)
-
Schulz,
A.,
Sung,
C.,
Spielberg,
A.,
Zhao,
W.,
Cheng,
R.,
Grinspun,
E.,
Rus,
D. & Matusik,
W.
(2017).
Interactive robogami: An end-to-end system for design of robots with ground locomotion.
The International Journal of Robotics Research. 1–17.
https://doi.org/10.1177/0278364917723465
-
Shimada,
Thompson,
Yan,
Wood & Fearing
(2000)
-
Shimada,
E.,
Thompson,
J.,
Yan,
J.,
Wood,
R. & Fearing,
R.
(2000).
Prototyping millirobots using dextrous microassembly and folding.
Symposium on Microrobotics ASME Int. Mechanical Engineering Cong. and Exp. 1–8.
-
Sreetharan,
Whitney,
Strauss & Wood
(2012)
-
Sreetharan,
P.,
Whitney,
J.,
Strauss,
M. & Wood,
R.
(2012).
Monolithic fabrication of millimeter-scale machines.
Journal of Micromechanics and Microengineering, 22(5). 55027.
https://doi.org/10.1088/0960-1317/22/5/055027
-
Wood,
Avadhanula,
Menon & Fearing
(2003)
-
Wood,
R.,
Avadhanula,
S.,
Menon,
M. & Fearing,
R.
(2003).
Microrobotics using composite materials: the micromechanical flying insect thorax.
IEEE.
https://doi.org/10.1109/ROBOT.2003.1241863
-
Wood,
Steltz & Fearing
(2005)
-
Wood,
R.,
Steltz,
E. & Fearing,
R.
(2005).
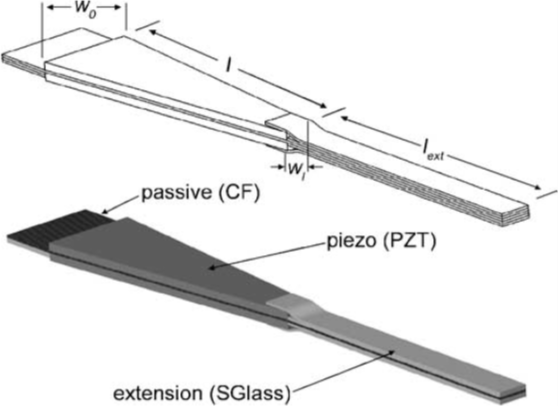
Optimal energy density piezoelectric bending actuators.
Sensors and Actuators A: Physical, 119(2). 476–488.
https://doi.org/10.1016/j.sna.2004.10.024
-
Yan,
Wood,
Avadhanula,
Sitti & Fearing
(2001)
-
Yan,
J.,
Wood,
R.,
Avadhanula,
S.,
Sitti,
M. & Fearing,
R.
(2001).
Towards flapping wing control for a micromechanical flying insect.
IEEE.
https://doi.org/10.1109/ROBOT.2001.933225