% matplotlib inline
import pynamics
from pynamics.frame import Frame
from pynamics.variable_types import Differentiable , Constant
from pynamics.system import System
from pynamics.body import Body
from pynamics.dyadic import Dyadic
from pynamics.output import Output , PointsOutput
#from pynamics.particle import Particle
import pynamics.integration
import sympy
import scipy
#import logging
#pynamics.logger.setLevel(logging.ERROR)
#pynamics.system.logger.setLevel(logging.ERROR)
import numpy
import matplotlib.pyplot as plt
plt . ion ()
<matplotlib.pyplot._IonContext at 0x7fd9bc437ee0>
from math import pi , sin , cos
system = System ()
pynamics . set_system ( __name__ , system )
tinitial = 0
tfinal = 5
tstep = 1 / 30
t = numpy . r_ [ tinitial : tfinal : tstep ]
ang_ini = 0
v = 1
x , x_d , x_dd = Differentiable ( 'x' , ini = [ 0 , v * cos ( ang_ini * pi / 180 )])
y , y_d , y_dd = Differentiable ( 'y' , ini = [ 1 , v * sin ( ang_ini * pi / 180 )])
z , z_d , z_dd = Differentiable ( 'z' , ini = [ 0 , 0 ])
qA , qA_d , qA_dd = Differentiable ( 'qA' , ini = [ 0 , 0 ])
qB , qB_d , qB_dd = Differentiable ( 'qB' , ini = [ 0 , 0 ])
qC , qC_d , qC_dd = Differentiable ( 'qC' , ini = [ ang_ini * pi / 180 , 0 ])
# mC = Constant(0,'mC')
g = Constant ( 9.81 , 'g' )
I_11 = Constant ( 6e-3 , 'I_11' )
rho = Constant ( 1.292 , 'rho' )
r = Constant ( 0 , 'r' )
# Sw = Constant(.1,'Sw')
# Se = Constant(.025,'Se')
l = Constant ( .35 , 'l' )
lw = Constant ( - .03 , 'lw' )
le = Constant ( .04 , 'le' )
qE = Constant ( 3 * pi / 180 , 'qE' )
ini = system . get_ini ()
N = Frame ( 'N' , system )
A = Frame ( 'A' , system )
B = Frame ( 'B' , system )
C = Frame ( 'C' , system )
E = Frame ( 'E' , system )
system . set_newtonian ( N )
A . rotate_fixed_axis ( N ,[ 1 , 0 , 0 ], qA , system )
B . rotate_fixed_axis ( A ,[ 0 , 1 , 0 ], qB , system )
C . rotate_fixed_axis ( B ,[ 0 , 0 , 1 ], qC , system )
E . rotate_fixed_axis ( C ,[ 0 , 0 , 1 ], - qE , system )
pCcm = x * N . x + y * N . y + z * N . z
pCcp = pCcm - lw * C . x
mC = pi * r ** 2 * .1
pC1 = pCcm
pC2 = pCcm - l * C . x
pE = pC2 - le * E . x
vcm = pCcm . time_derivative ()
vcm = pCcm . time_derivative ()
IC = Dyadic . build ( C , I_11 , I_11 , I_11 )
Body ( 'BodyC' , C , pCcm , mC , IC )
Area = 2 * pi * r ** 2
Area_f = 2 * pi * .001
#Area_f = 0
vcp = pCcp . time_derivative ()
f_aero_C = rho * vcp . length () * ( vcp . dot ( C . y )) * Area * C . y
f_aero_Cf = rho * vcp . length () * ( vcp . dot ( C . x )) * Area_f * C . x
ve = pE . time_derivative ()
f_aero_E = rho * ve . length () * ( ve . dot ( E . y )) * Area * E . y
f_aero_Ef = rho * ve . length () * ( ve . dot ( E . x )) * Area_f * E . x
system . addforcegravity ( - g * N . y )
system . addforce ( - f_aero_C , vcp )
system . addforce ( - f_aero_E , ve )
system . addforce ( - f_aero_Cf , vcp )
system . addforce ( - f_aero_Ef , ve )
<pynamics.force.Force at 0x7fd98516b430>
f , ma = system . getdynamics ()
func1 = system . state_space_post_invert ( f , ma )
2022-04-14 14:50:28,174 - pynamics.system - INFO - getting dynamic equations
2022-04-14 14:50:28,467 - pynamics.system - INFO - solving a = f/m and creating function
2022-04-14 14:50:29,429 - pynamics.system - INFO - substituting constrained in Ma-f.
2022-04-14 14:50:30,135 - pynamics.system - INFO - done solving a = f/m and creating function
PE = system . getPEGravity ( 0 * N . x )
KE = system . get_KE ()
E = KE - PE
E
0.5*I_11*qC_d*(qA_d*sin(qB) + qC_d) + 0.314159265358979*g*r**2*y + 0.15707963267949*r**2*(x_d**2 + y_d**2 + z_d**2) + 0.5*qA_d*(I_11*(qA_d*sin(qB) + qC_d)*sin(qB) - I_11*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qC)*cos(qB) + I_11*(qA_d*cos(qB)*cos(qC) + qB_d*sin(qC))*cos(qB)*cos(qC)) + 0.5*qB_d*(I_11*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qC) + I_11*(qA_d*cos(qB)*cos(qC) + qB_d*sin(qC))*sin(qC))
-0.314159265358979*g*r**2*y
def run ( args ):
my_r = args [ 0 ]
constants = system . constant_values . copy ()
constants [ r ] = my_r
states = pynamics . integration . integrate_odeint ( func1 , ini , t , args = ({ 'constants' : constants },))
return states
system . get_state_variables ()
[x, y, z, qA, qB, qC, x_d, y_d, z_d, qA_d, qB_d, qC_d]
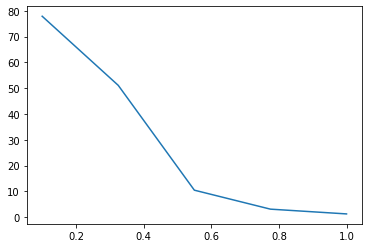
def measure_perf ( args ):
print ( 'r: ' , args [ 0 ])
# if args[0]>1:
# return 1000
# if args[0]<=0:
# return 1000
try :
states = run ( args )
perf = ( 1 / states [ - 1 , 0 ]) ** 2 + 5 * ( states [ - 1 , 1 ]) ** 2
return perf
except scipy . linalg . LinAlgError :
return 1000
yy = []
xx = numpy . r_ [ 0.1 : 1 : 5 j ]
for ii in xx :
yy . append ( measure_perf ([ ii ]))
yy = numpy . array ( yy )
plt . plot ( xx , yy )
2022-04-14 14:50:30,271 - pynamics.integration - INFO - beginning integration
2022-04-14 14:50:30,272 - pynamics.system - INFO - integration at time 0000.00
r: 0.1
2022-04-14 14:50:33,779 - pynamics.integration - INFO - finished integration
2022-04-14 14:50:33,781 - pynamics.integration - INFO - beginning integration
2022-04-14 14:50:33,922 - pynamics.system - INFO - integration at time 0000.01
r: 0.325
2022-04-14 14:50:37,229 - pynamics.integration - INFO - finished integration
2022-04-14 14:50:37,231 - pynamics.integration - INFO - beginning integration
r: 0.55
2022-04-14 14:50:37,545 - pynamics.system - INFO - integration at time 0000.04
2022-04-14 14:50:41,030 - pynamics.system - INFO - integration at time 0001.04
2022-04-14 14:50:44,278 - pynamics.integration - INFO - finished integration
2022-04-14 14:50:44,279 - pynamics.integration - INFO - beginning integration
2022-04-14 14:50:44,447 - pynamics.system - INFO - integration at time 0000.01
r: 0.775
2022-04-14 14:50:47,857 - pynamics.system - INFO - integration at time 0004.81
2022-04-14 14:50:47,941 - pynamics.integration - INFO - finished integration
2022-04-14 14:50:47,943 - pynamics.integration - INFO - beginning integration
r: 1.0
2022-04-14 14:50:51,248 - pynamics.system - INFO - integration at time 0002.72
2022-04-14 14:50:52,408 - pynamics.integration - INFO - finished integration
[<matplotlib.lines.Line2D at 0x7fd982e278b0>]
result = scipy . optimize . minimize ( measure_perf ,[ .5 ], method = 'powell' , bounds = [( .1 , 1 )])
best = result . x
2022-04-14 14:50:52,615 - pynamics.integration - INFO - beginning integration
r: 0.5
2022-04-14 14:50:54,808 - pynamics.system - INFO - integration at time 0003.79
2022-04-14 14:50:54,988 - pynamics.integration - INFO - finished integration
2022-04-14 14:50:54,989 - pynamics.integration - INFO - beginning integration
r: 0.4437694101250946
2022-04-14 14:50:58,132 - pynamics.system - INFO - integration at time 0001.21
2022-04-14 14:50:59,976 - pynamics.integration - INFO - finished integration
2022-04-14 14:50:59,977 - pynamics.integration - INFO - beginning integration
r: 0.6562305898749052
2022-04-14 14:51:01,431 - pynamics.system - INFO - integration at time 0000.95
2022-04-14 14:51:03,260 - pynamics.integration - INFO - finished integration
2022-04-14 14:51:03,261 - pynamics.integration - INFO - beginning integration
r: 0.7875388202501892
2022-04-14 14:51:04,747 - pynamics.system - INFO - integration at time 0001.08
2022-04-14 14:51:06,518 - pynamics.integration - INFO - finished integration
2022-04-14 14:51:06,520 - pynamics.integration - INFO - beginning integration
r: 0.7877560928849625
2022-04-14 14:51:07,993 - pynamics.system - INFO - integration at time 0000.91
2022-04-14 14:51:10,593 - pynamics.integration - INFO - finished integration
2022-04-14 14:51:10,595 - pynamics.integration - INFO - beginning integration
r: 0.8688260514978312
2022-04-14 14:51:11,322 - pynamics.system - INFO - integration at time 0000.19
2022-04-14 14:51:14,261 - pynamics.integration - INFO - finished integration
2022-04-14 14:51:14,262 - pynamics.integration - INFO - beginning integration
r: 0.9189300413871313
2022-04-14 14:51:14,717 - pynamics.system - INFO - integration at time 0000.07
2022-04-14 14:51:18,409 - pynamics.system - INFO - integration at time 0004.59
2022-04-14 14:51:18,712 - pynamics.integration - INFO - finished integration
2022-04-14 14:51:18,714 - pynamics.integration - INFO - beginning integration
r: 0.9498960101106999
2022-04-14 14:51:21,806 - pynamics.system - INFO - integration at time 0003.38
2022-04-14 14:51:22,906 - pynamics.integration - INFO - finished integration
2022-04-14 14:51:22,907 - pynamics.integration - INFO - beginning integration
r: 0.9690340312764314
2022-04-14 14:51:25,154 - pynamics.system - INFO - integration at time 0002.05
2022-04-14 14:51:27,389 - pynamics.integration - INFO - finished integration
2022-04-14 14:51:27,391 - pynamics.integration - INFO - beginning integration
r: 0.9808619788342684
2022-04-14 14:51:28,344 - pynamics.system - INFO - integration at time 0000.28
2022-04-14 14:51:31,537 - pynamics.system - INFO - integration at time 0003.54
2022-04-14 14:51:32,389 - pynamics.integration - INFO - finished integration
2022-04-14 14:51:32,390 - pynamics.integration - INFO - beginning integration
r: 0.988172052442163
2022-04-14 14:51:34,817 - pynamics.system - INFO - integration at time 0001.81
2022-04-14 14:51:36,730 - pynamics.integration - INFO - finished integration
2022-04-14 14:51:36,731 - pynamics.integration - INFO - beginning integration
r: 0.9926899263921054
2022-04-14 14:51:38,187 - pynamics.system - INFO - integration at time 0000.83
2022-04-14 14:51:41,823 - pynamics.system - INFO - integration at time 0004.72
2022-04-14 14:51:42,172 - pynamics.integration - INFO - finished integration
2022-04-14 14:51:42,174 - pynamics.integration - INFO - beginning integration
r: 0.9954821260500576
2022-04-14 14:51:45,390 - pynamics.system - INFO - integration at time 0002.99
2022-04-14 14:51:46,665 - pynamics.integration - INFO - finished integration
2022-04-14 14:51:46,666 - pynamics.integration - INFO - beginning integration
r: 0.9972078003420479
2022-04-14 14:51:48,710 - pynamics.system - INFO - integration at time 0001.72
2022-04-14 14:51:50,554 - pynamics.integration - INFO - finished integration
2022-04-14 14:51:50,556 - pynamics.integration - INFO - beginning integration
r: 0.9982743257080098
2022-04-14 14:51:51,943 - pynamics.system - INFO - integration at time 0001.15
2022-04-14 14:51:54,157 - pynamics.integration - INFO - finished integration
2022-04-14 14:51:54,159 - pynamics.integration - INFO - beginning integration
r: 0.9989334746340381
2022-04-14 14:51:55,382 - pynamics.system - INFO - integration at time 0000.41
2022-04-14 14:51:59,130 - pynamics.system - INFO - integration at time 0004.25
2022-04-14 14:52:00,082 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:00,084 - pynamics.integration - INFO - beginning integration
r: 0.9993408510739716
2022-04-14 14:52:02,844 - pynamics.system - INFO - integration at time 0001.87
2022-04-14 14:52:04,428 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:04,430 - pynamics.integration - INFO - beginning integration
r: 0.9995926235600665
2022-04-14 14:52:06,139 - pynamics.system - INFO - integration at time 0001.16
2022-04-14 14:52:09,214 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:09,216 - pynamics.integration - INFO - beginning integration
2022-04-14 14:52:09,301 - pynamics.system - INFO - integration at time 0000.00
r: 0.9997482275139051
2022-04-14 14:52:12,676 - pynamics.system - INFO - integration at time 0002.28
2022-04-14 14:52:14,724 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:14,725 - pynamics.integration - INFO - beginning integration
r: 0.9998443960461614
2022-04-14 14:52:15,802 - pynamics.system - INFO - integration at time 0000.56
2022-04-14 14:52:18,645 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:18,646 - pynamics.integration - INFO - beginning integration
r: 0.9999038314677438
2022-04-14 14:52:18,987 - pynamics.system - INFO - integration at time 0000.03
2022-04-14 14:52:22,310 - pynamics.system - INFO - integration at time 0003.51
2022-04-14 14:52:23,537 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:23,539 - pynamics.integration - INFO - beginning integration
r: 0.9999405645784174
2022-04-14 14:52:25,556 - pynamics.system - INFO - integration at time 0001.32
2022-04-14 14:52:28,448 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:28,450 - pynamics.integration - INFO - beginning integration
r: 1.4998811291568348
2022-04-14 14:52:28,668 - pynamics.system - INFO - integration at time 0000.01
2022-04-14 14:52:31,773 - pynamics.system - INFO - integration at time 0003.57
2022-04-14 14:52:33,645 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:33,646 - pynamics.integration - INFO - beginning integration
r: 0.44376941012509463
2022-04-14 14:52:34,887 - pynamics.system - INFO - integration at time 0000.83
2022-04-14 14:52:37,994 - pynamics.system - INFO - integration at time 0003.52
2022-04-14 14:52:38,415 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:38,416 - pynamics.integration - INFO - beginning integration
r: 0.6562305898749053
2022-04-14 14:52:41,082 - pynamics.system - INFO - integration at time 0004.16
2022-04-14 14:52:41,459 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:41,461 - pynamics.integration - INFO - beginning integration
r: 0.7875388202501892
2022-04-14 14:52:44,200 - pynamics.system - INFO - integration at time 0004.35
2022-04-14 14:52:44,591 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:44,592 - pynamics.integration - INFO - beginning integration
r: 0.7877560835773538
2022-04-14 14:52:47,335 - pynamics.system - INFO - integration at time 0003.67
2022-04-14 14:52:48,207 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:48,208 - pynamics.integration - INFO - beginning integration
r: 0.8688260457454127
2022-04-14 14:52:50,409 - pynamics.system - INFO - integration at time 0002.81
2022-04-14 14:52:51,696 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:51,698 - pynamics.integration - INFO - beginning integration
r: 0.9189300378319412
2022-04-14 14:52:53,487 - pynamics.system - INFO - integration at time 0001.38
2022-04-14 14:52:55,719 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:55,720 - pynamics.integration - INFO - beginning integration
r: 0.9498960079134715
2022-04-14 14:52:56,564 - pynamics.system - INFO - integration at time 0000.34
2022-04-14 14:52:59,522 - pynamics.integration - INFO - finished integration
2022-04-14 14:52:59,523 - pynamics.integration - INFO - beginning integration
r: 0.9690340299184697
2022-04-14 14:52:59,739 - pynamics.system - INFO - integration at time 0000.01
2022-04-14 14:53:02,883 - pynamics.system - INFO - integration at time 0003.49
2022-04-14 14:53:03,639 - pynamics.integration - INFO - finished integration
2022-04-14 14:53:03,640 - pynamics.integration - INFO - beginning integration
r: 0.9808619779950019
2022-04-14 14:53:05,949 - pynamics.system - INFO - integration at time 0001.35
2022-04-14 14:53:08,286 - pynamics.integration - INFO - finished integration
2022-04-14 14:53:08,287 - pynamics.integration - INFO - beginning integration
r: 0.9881720519234678
2022-04-14 14:53:08,993 - pynamics.system - INFO - integration at time 0000.16
2022-04-14 14:53:12,107 - pynamics.system - INFO - integration at time 0004.57
2022-04-14 14:53:12,467 - pynamics.integration - INFO - finished integration
2022-04-14 14:53:12,468 - pynamics.integration - INFO - beginning integration
r: 0.9926899260715342
2022-04-14 14:53:15,225 - pynamics.system - INFO - integration at time 0002.37
2022-04-14 14:53:17,200 - pynamics.integration - INFO - finished integration
2022-04-14 14:53:17,201 - pynamics.integration - INFO - beginning integration
r: 0.9954821258519336
2022-04-14 14:53:18,328 - pynamics.system - INFO - integration at time 0000.73
2022-04-14 14:53:21,037 - pynamics.integration - INFO - finished integration
2022-04-14 14:53:21,039 - pynamics.integration - INFO - beginning integration
r: 0.9972078002196005
2022-04-14 14:53:21,514 - pynamics.system - INFO - integration at time 0000.06
2022-04-14 14:53:24,694 - pynamics.system - INFO - integration at time 0004.82
2022-04-14 14:53:24,776 - pynamics.integration - INFO - finished integration
2022-04-14 14:53:24,777 - pynamics.integration - INFO - beginning integration
r: 0.9982743256323331
2022-04-14 14:53:27,809 - pynamics.system - INFO - integration at time 0003.59
2022-04-14 14:53:28,453 - pynamics.integration - INFO - finished integration
2022-04-14 14:53:28,454 - pynamics.integration - INFO - beginning integration
r: 0.9989334745872673
2022-04-14 14:53:30,950 - pynamics.system - INFO - integration at time 0001.81
2022-04-14 14:53:32,705 - pynamics.integration - INFO - finished integration
2022-04-14 14:53:32,706 - pynamics.integration - INFO - beginning integration
r: 0.9993408510450658
2022-04-14 14:53:34,122 - pynamics.system - INFO - integration at time 0000.94
2022-04-14 14:53:37,388 - pynamics.system - INFO - integration at time 0004.53
2022-04-14 14:53:38,203 - pynamics.integration - INFO - finished integration
2022-04-14 14:53:38,204 - pynamics.integration - INFO - beginning integration
r: 0.9995926235422017
2022-04-14 14:53:40,593 - pynamics.system - INFO - integration at time 0003.04
2022-04-14 14:53:41,916 - pynamics.integration - INFO - finished integration
2022-04-14 14:53:41,917 - pynamics.integration - INFO - beginning integration
r: 0.9997482275028641
2022-04-14 14:53:43,853 - pynamics.system - INFO - integration at time 0001.12
2022-04-14 14:53:46,666 - pynamics.integration - INFO - finished integration
2022-04-14 14:53:46,668 - pynamics.integration - INFO - beginning integration
r: 0.9998443960393376
2022-04-14 14:53:46,957 - pynamics.system - INFO - integration at time 0000.02
2022-04-14 14:53:50,100 - pynamics.system - INFO - integration at time 0004.39
2022-04-14 14:53:50,485 - pynamics.integration - INFO - finished integration
2022-04-14 14:53:50,487 - pynamics.integration - INFO - beginning integration
r: 0.9999038314635265
2022-04-14 14:53:53,194 - pynamics.system - INFO - integration at time 0002.37
2022-04-14 14:53:54,844 - pynamics.integration - INFO - finished integration
2022-04-14 14:53:54,846 - pynamics.integration - INFO - beginning integration
r: 0.999940564575811
2022-04-14 14:53:56,269 - pynamics.system - INFO - integration at time 0001.03
2022-04-14 14:53:59,010 - pynamics.integration - INFO - finished integration
2022-04-14 14:53:59,011 - pynamics.integration - INFO - beginning integration
r: 0.9999632668877154
2022-04-14 14:53:59,360 - pynamics.system - INFO - integration at time 0000.03
2022-04-14 14:54:02,525 - pynamics.system - INFO - integration at time 0004.45
2022-04-14 14:54:02,948 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:02,951 - pynamics.integration - INFO - beginning integration
r: 0.9999799315735381
2022-04-14 14:54:05,541 - pynamics.system - INFO - integration at time 0003.31
2022-04-14 14:54:06,972 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:06,974 - pynamics.integration - INFO - beginning integration
r: 0.4437694101250945
2022-04-14 14:54:08,492 - pynamics.system - INFO - integration at time 0000.93
2022-04-14 14:54:11,436 - pynamics.system - INFO - integration at time 0004.31
2022-04-14 14:54:11,490 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:11,492 - pynamics.integration - INFO - beginning integration
r: 0.6562305898749052
2022-04-14 14:54:14,397 - pynamics.system - INFO - integration at time 0004.96
2022-04-14 14:54:14,405 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:14,406 - pynamics.integration - INFO - beginning integration
r: 0.7875388202501892
2022-04-14 14:54:17,372 - pynamics.system - INFO - integration at time 0004.95
2022-04-14 14:54:17,382 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:17,384 - pynamics.integration - INFO - beginning integration
r: 0.7877560936006085
2022-04-14 14:54:20,517 - pynamics.system - INFO - integration at time 0003.67
2022-04-14 14:54:21,055 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:21,056 - pynamics.integration - INFO - beginning integration
r: 0.8688260519401247
2022-04-14 14:54:23,640 - pynamics.system - INFO - integration at time 0003.21
2022-04-14 14:54:24,361 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:24,363 - pynamics.integration - INFO - beginning integration
r: 0.9189300416604838
2022-04-14 14:54:26,855 - pynamics.system - INFO - integration at time 0003.04
2022-04-14 14:54:27,798 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:27,800 - pynamics.integration - INFO - beginning integration
r: 0.949896010279641
2022-04-14 14:54:29,989 - pynamics.system - INFO - integration at time 0001.91
2022-04-14 14:54:31,470 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:31,472 - pynamics.integration - INFO - beginning integration
r: 0.9690340313808428
2022-04-14 14:54:33,036 - pynamics.system - INFO - integration at time 0001.40
2022-04-14 14:54:35,285 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:35,286 - pynamics.integration - INFO - beginning integration
r: 0.9808619788987982
2022-04-14 14:54:36,063 - pynamics.system - INFO - integration at time 0000.23
2022-04-14 14:54:39,075 - pynamics.system - INFO - integration at time 0003.59
2022-04-14 14:54:40,298 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:40,299 - pynamics.integration - INFO - beginning integration
r: 0.9881720524820445
2022-04-14 14:54:42,119 - pynamics.system - INFO - integration at time 0001.33
2022-04-14 14:54:43,987 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:43,988 - pynamics.integration - INFO - beginning integration
r: 0.9926899264167536
2022-04-14 14:54:45,170 - pynamics.system - INFO - integration at time 0000.81
2022-04-14 14:54:47,966 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:47,967 - pynamics.integration - INFO - beginning integration
r: 0.995482126065291
2022-04-14 14:54:48,194 - pynamics.system - INFO - integration at time 0000.01
2022-04-14 14:54:51,210 - pynamics.system - INFO - integration at time 0003.34
2022-04-14 14:54:52,534 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:52,535 - pynamics.integration - INFO - beginning integration
r: 0.9972078003514626
2022-04-14 14:54:54,238 - pynamics.system - INFO - integration at time 0001.46
2022-04-14 14:54:56,077 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:56,078 - pynamics.integration - INFO - beginning integration
r: 0.9982743257138283
2022-04-14 14:54:57,262 - pynamics.system - INFO - integration at time 0000.86
2022-04-14 14:54:59,577 - pynamics.integration - INFO - finished integration
2022-04-14 14:54:59,578 - pynamics.integration - INFO - beginning integration
r: 0.9989334746376343
2022-04-14 14:55:00,271 - pynamics.system - INFO - integration at time 0000.16
2022-04-14 14:55:02,921 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:02,922 - pynamics.integration - INFO - beginning integration
r: 0.9993408510761942
2022-04-14 14:55:03,300 - pynamics.system - INFO - integration at time 0000.04
2022-04-14 14:55:06,304 - pynamics.system - INFO - integration at time 0003.28
2022-04-14 14:55:07,118 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:07,120 - pynamics.integration - INFO - beginning integration
r: 0.9995926235614401
2022-04-14 14:55:09,291 - pynamics.system - INFO - integration at time 0002.13
2022-04-14 14:55:11,066 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:11,067 - pynamics.integration - INFO - beginning integration
r: 0.9997482275147541
2022-04-14 14:55:12,308 - pynamics.system - INFO - integration at time 0000.92
2022-04-14 14:55:15,248 - pynamics.system - INFO - integration at time 0004.19
2022-04-14 14:55:15,588 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:15,589 - pynamics.integration - INFO - beginning integration
r: 0.999844396046686
2022-04-14 14:55:18,203 - pynamics.system - INFO - integration at time 0003.71
2022-04-14 14:55:19,359 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:19,361 - pynamics.integration - INFO - beginning integration
r: 0.999903831468068
2022-04-14 14:55:21,182 - pynamics.system - INFO - integration at time 0001.31
2022-04-14 14:55:23,750 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:23,752 - pynamics.integration - INFO - beginning integration
r: 0.9999405645786179
2022-04-14 14:55:24,259 - pynamics.system - INFO - integration at time 0000.08
2022-04-14 14:55:27,268 - pynamics.system - INFO - integration at time 0004.70
2022-04-14 14:55:27,641 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:27,642 - pynamics.integration - INFO - beginning integration
r: 0.9999632668894501
2022-04-14 14:55:30,226 - pynamics.system - INFO - integration at time 0002.92
2022-04-14 14:55:31,315 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:31,316 - pynamics.integration - INFO - beginning integration
r: 0.9999772976891678
2022-04-14 14:55:33,159 - pynamics.system - INFO - integration at time 0001.94
2022-04-14 14:55:35,071 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:35,073 - pynamics.integration - INFO - beginning integration
r: 0.9999859692002825
2022-04-14 14:55:36,086 - pynamics.system - INFO - integration at time 0000.58
2022-04-14 14:55:38,863 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:38,864 - pynamics.integration - INFO - beginning integration
2022-04-14 14:55:39,014 - pynamics.system - INFO - integration at time 0000.01
r: 0.9999913284888853
2022-04-14 14:55:42,021 - pynamics.system - INFO - integration at time 0004.16
2022-04-14 14:55:42,674 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:42,675 - pynamics.integration - INFO - beginning integration
r: 0.9999946407113972
2022-04-14 14:55:45,062 - pynamics.system - INFO - integration at time 0001.58
2022-04-14 14:55:47,527 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:47,529 - pynamics.integration - INFO - beginning integration
r: 0.999996687777488
2022-04-14 14:55:48,079 - pynamics.system - INFO - integration at time 0000.10
2022-04-14 14:55:51,097 - pynamics.system - INFO - integration at time 0003.37
2022-04-14 14:55:52,183 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:52,185 - pynamics.integration - INFO - beginning integration
r: 0.9999979529339093
2022-04-14 14:55:54,094 - pynamics.system - INFO - integration at time 0001.79
2022-04-14 14:55:55,518 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:55,519 - pynamics.integration - INFO - beginning integration
r: 0.9999987348435787
2022-04-14 14:55:57,089 - pynamics.system - INFO - integration at time 0001.27
2022-04-14 14:55:59,053 - pynamics.integration - INFO - finished integration
2022-04-14 14:55:59,055 - pynamics.integration - INFO - beginning integration
r: 0.9999992180903305
2022-04-14 14:56:00,105 - pynamics.system - INFO - integration at time 0000.64
2022-04-14 14:56:03,005 - pynamics.integration - INFO - finished integration
2022-04-14 14:56:03,007 - pynamics.integration - INFO - beginning integration
2022-04-14 14:56:03,133 - pynamics.system - INFO - integration at time 0000.00
r: 0.9999995167532482
2022-04-14 14:56:06,075 - pynamics.system - INFO - integration at time 0003.79
2022-04-14 14:56:07,014 - pynamics.integration - INFO - finished integration
2022-04-14 14:56:07,015 - pynamics.integration - INFO - beginning integration
r: 0.9999997013370824
2022-04-14 14:56:09,055 - pynamics.system - INFO - integration at time 0001.53
2022-04-14 14:56:11,405 - pynamics.integration - INFO - finished integration
2022-04-14 14:56:11,406 - pynamics.integration - INFO - beginning integration
r: 0.9999998154161658
2022-04-14 14:56:12,017 - pynamics.system - INFO - integration at time 0000.13
2022-04-14 14:56:14,982 - pynamics.system - INFO - integration at time 0004.42
2022-04-14 14:56:15,348 - pynamics.integration - INFO - finished integration
2022-04-14 14:56:15,349 - pynamics.integration - INFO - beginning integration
r: 0.9999997788400657
2022-04-14 14:56:17,965 - pynamics.system - INFO - integration at time 0002.99
2022-04-14 14:56:19,000 - pynamics.integration - INFO - finished integration
2022-04-14 14:56:19,001 - pynamics.integration - INFO - beginning integration
r: 0.999999761022426
2022-04-14 14:56:20,951 - pynamics.system - INFO - integration at time 0001.70
2022-04-14 14:56:22,800 - pynamics.integration - INFO - finished integration
2022-04-14 14:56:22,801 - pynamics.integration - INFO - beginning integration
r: 0.9999997887178371
2022-04-14 14:56:23,992 - pynamics.system - INFO - integration at time 0000.72
2022-04-14 14:56:26,638 - pynamics.integration - INFO - finished integration
2022-04-14 14:56:26,639 - pynamics.integration - INFO - beginning integration
r: 0.999999772034333
2022-04-14 14:56:27,013 - pynamics.system - INFO - integration at time 0000.04
2022-04-14 14:56:29,953 - pynamics.system - INFO - integration at time 0004.87
2022-04-14 14:56:30,171 - pynamics.integration - INFO - finished integration
2022-04-14 14:56:30,172 - pynamics.integration - INFO - beginning integration
r: 0.9999997678281588
2022-04-14 14:56:32,899 - pynamics.system - INFO - integration at time 0003.18
2022-04-14 14:56:34,103 - pynamics.integration - INFO - finished integration
2022-04-14 14:56:34,104 - pynamics.integration - INFO - beginning integration
r: 0.9999997746338916
2022-04-14 14:56:35,889 - pynamics.system - INFO - integration at time 0001.52
2022-04-14 14:56:38,274 - pynamics.integration - INFO - finished integration
2022-04-14 14:56:38,275 - pynamics.integration - INFO - beginning integration
r: 0.9999997704277174
2022-04-14 14:56:38,834 - pynamics.system - INFO - integration at time 0000.11
2022-04-14 14:56:41,762 - pynamics.system - INFO - integration at time 0004.74
2022-04-14 14:56:41,891 - pynamics.integration - INFO - finished integration
2022-04-14 14:56:41,896 - pynamics.integration - INFO - beginning integration
<lambdifygenerated-1>:2: VisibleDeprecationWarning: Creating an ndarray from ragged nested sequences (which is a list-or-tuple of lists-or-tuples-or ndarrays with different lengths or shapes) is deprecated. If you meant to do this, you must specify 'dtype=object' when creating the ndarray.
return array([[0.314159265358979*r**2, 0, 0, 0, 0, 0], [0, 0.314159265358979*r**2, 0, 0, 0, 0], [0, 0, 0.314159265358979*r**2, 0, 0, 0], [0, 0, 0, I_11*sin(qB)**2 + (I_11*sin(qC)**2*cos(qB) + I_11*cos(qB)*cos(qC)**2)*cos(qB), 0, I_11*sin(qB)], [0, 0, 0, 0, I_11*sin(qC)**2 + I_11*cos(qC)**2, 0], [0, 0, 0, I_11*sin(qB), 0, I_11]])
<lambdifygenerated-2>:2: VisibleDeprecationWarning: Creating an ndarray from ragged nested sequences (which is a list-or-tuple of lists-or-tuples-or ndarrays with different lengths or shapes) is deprecated. If you meant to do this, you must specify 'dtype=object' when creating the ndarray.
return array([[-6.28318530717959*r**2*rho*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*cos(qB) + 6.28318530717959*r**2*rho*(-lw*(qA_d*sin(qB) + qC_d) - x_d*sin(qC)*cos(qB) + (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*sin(qC) + (y_d*cos(qA) + z_d*sin(qA))*cos(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qC)*cos(qB) - 0.00628318530717959*rho*(sin(qE)*sin(qC) + cos(qE)*cos(qC))*(l*(qA_d*sin(qB) + qC_d)*sin(qE) + (y_d*cos(qA) + z_d*sin(qA))*(-sin(qE)*cos(qC) + sin(qC)*cos(qE)) + (sin(qE)*sin(qC) + cos(qE)*cos(qC))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*cos(qB) - 0.00628318530717959*rho*(x_d*cos(qB)*cos(qC) - (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*cos(qC) + (y_d*cos(qA) + z_d*sin(qA))*sin(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*cos(qB)*cos(qC)], [-0.314159265358979*g*r**2 - 6.28318530717959*r**2*rho*(sin(qE)*sin(qC) + cos(qE)*cos(qC))*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*cos(qA) - 6.28318530717959*r**2*rho*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA)*sin(qB) + 6.28318530717959*r**2*rho*(-lw*(qA_d*sin(qB) + qC_d) - x_d*sin(qC)*cos(qB) + (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*sin(qC) + (y_d*cos(qA) + z_d*sin(qA))*cos(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA)*sin(qB)*sin(qC) - 6.28318530717959*r**2*rho*(-lw*(qA_d*sin(qB) + qC_d) - x_d*sin(qC)*cos(qB) + (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*sin(qC) + (y_d*cos(qA) + z_d*sin(qA))*cos(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*cos(qA)*cos(qC) - 0.00628318530717959*rho*(sin(qE)*sin(qC) + cos(qE)*cos(qC))*(l*(qA_d*sin(qB) + qC_d)*sin(qE) + (y_d*cos(qA) + z_d*sin(qA))*(-sin(qE)*cos(qC) + sin(qC)*cos(qE)) + (sin(qE)*sin(qC) + cos(qE)*cos(qC))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA)*sin(qB) - 0.00628318530717959*rho*(-sin(qE)*cos(qC) + sin(qC)*cos(qE))*(l*(qA_d*sin(qB) + qC_d)*sin(qE) + (y_d*cos(qA) + z_d*sin(qA))*(-sin(qE)*cos(qC) + sin(qC)*cos(qE)) + (sin(qE)*sin(qC) + cos(qE)*cos(qC))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*cos(qA) - 0.00628318530717959*rho*(x_d*cos(qB)*cos(qC) - (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*cos(qC) + (y_d*cos(qA) + z_d*sin(qA))*sin(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA)*sin(qB)*cos(qC) - 0.00628318530717959*rho*(x_d*cos(qB)*cos(qC) - (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*cos(qC) + (y_d*cos(qA) + z_d*sin(qA))*sin(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qC)*cos(qA)], [-6.28318530717959*r**2*rho*(sin(qE)*sin(qC) + cos(qE)*cos(qC))*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA) + 6.28318530717959*r**2*rho*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qB)*cos(qA) - 6.28318530717959*r**2*rho*(-lw*(qA_d*sin(qB) + qC_d) - x_d*sin(qC)*cos(qB) + (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*sin(qC) + (y_d*cos(qA) + z_d*sin(qA))*cos(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA)*cos(qC) - 6.28318530717959*r**2*rho*(-lw*(qA_d*sin(qB) + qC_d) - x_d*sin(qC)*cos(qB) + (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*sin(qC) + (y_d*cos(qA) + z_d*sin(qA))*cos(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qB)*sin(qC)*cos(qA) + 0.00628318530717959*rho*(sin(qE)*sin(qC) + cos(qE)*cos(qC))*(l*(qA_d*sin(qB) + qC_d)*sin(qE) + (y_d*cos(qA) + z_d*sin(qA))*(-sin(qE)*cos(qC) + sin(qC)*cos(qE)) + (sin(qE)*sin(qC) + cos(qE)*cos(qC))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qB)*cos(qA) - 0.00628318530717959*rho*(-sin(qE)*cos(qC) + sin(qC)*cos(qE))*(l*(qA_d*sin(qB) + qC_d)*sin(qE) + (y_d*cos(qA) + z_d*sin(qA))*(-sin(qE)*cos(qC) + sin(qC)*cos(qE)) + (sin(qE)*sin(qC) + cos(qE)*cos(qC))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA) - 0.00628318530717959*rho*(x_d*cos(qB)*cos(qC) - (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*cos(qC) + (y_d*cos(qA) + z_d*sin(qA))*sin(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA)*sin(qC) + 0.00628318530717959*rho*(x_d*cos(qB)*cos(qC) - (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*cos(qC) + (y_d*cos(qA) + z_d*sin(qA))*sin(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qB)*cos(qA)*cos(qC)], [-I_11*qA_d*qB_d*sin(qB)*cos(qB) + 6.28318530717959*l*r**2*rho*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qB)*cos(qE) - 0.00628318530717959*l*rho*(l*(qA_d*sin(qB) + qC_d)*sin(qE) + (y_d*cos(qA) + z_d*sin(qA))*(-sin(qE)*cos(qC) + sin(qC)*cos(qE)) + (sin(qE)*sin(qC) + cos(qE)*cos(qC))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qE)*sin(qB) + 6.28318530717959*le*r**2*rho*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qB) + 6.28318530717959*lw*r**2*rho*(-lw*(qA_d*sin(qB) + qC_d) - x_d*sin(qC)*cos(qB) + (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*sin(qC) + (y_d*cos(qA) + z_d*sin(qA))*cos(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qB) + qB_d*(-I_11*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qC) + I_11*(qA_d*cos(qB)*cos(qC) + qB_d*sin(qC))*cos(qC))*sin(qB) - (I_11*qB_d*(qA_d*sin(qB) + qC_d) - qC_d*(I_11*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qC) + I_11*(qA_d*cos(qB)*cos(qC) + qB_d*sin(qC))*sin(qC)))*cos(qB) - (-I_11*(qA_d*qB_d*sin(qB)*sin(qC) - qA_d*qC_d*cos(qB)*cos(qC) - qB_d*qC_d*sin(qC))*sin(qC) + I_11*(-qA_d*qB_d*sin(qB)*cos(qC) - qA_d*qC_d*sin(qC)*cos(qB) + qB_d*qC_d*cos(qC))*cos(qC))*cos(qB)], [-I_11*(qA_d*qB_d*sin(qB)*sin(qC) - qA_d*qC_d*cos(qB)*cos(qC) - qB_d*qC_d*sin(qC))*cos(qC) - I_11*(-qA_d*qB_d*sin(qB)*cos(qC) - qA_d*qC_d*sin(qC)*cos(qB) + qB_d*qC_d*cos(qC))*sin(qC) + qA_d*(I_11*(qA_d*sin(qB) + qC_d)*cos(qB) + I_11*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)*sin(qC) - I_11*(qA_d*cos(qB)*cos(qC) + qB_d*sin(qC))*sin(qB)*cos(qC)) - qC_d*(-I_11*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qC) + I_11*(qA_d*cos(qB)*cos(qC) + qB_d*sin(qC))*cos(qC))], [-I_11*qA_d*qB_d*cos(qB) + 6.28318530717959*l*r**2*rho*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*cos(qE) - 0.00628318530717959*l*rho*(l*(qA_d*sin(qB) + qC_d)*sin(qE) + (y_d*cos(qA) + z_d*sin(qA))*(-sin(qE)*cos(qC) + sin(qC)*cos(qE)) + (sin(qE)*sin(qC) + cos(qE)*cos(qC))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qE) + 6.28318530717959*le*r**2*rho*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB))) + 6.28318530717959*lw*r**2*rho*(-lw*(qA_d*sin(qB) + qC_d) - x_d*sin(qC)*cos(qB) + (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*sin(qC) + (y_d*cos(qA) + z_d*sin(qA))*cos(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB))) - qA_d*(I_11*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qC) + I_11*(qA_d*cos(qB)*cos(qC) + qB_d*sin(qC))*sin(qC))*cos(qB) + qB_d*(-I_11*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qC) + I_11*(qA_d*cos(qB)*cos(qC) + qB_d*sin(qC))*cos(qC))]])
2022-04-14 14:56:45,004 - pynamics.system - INFO - integration at time 0003.93
2022-04-14 14:56:45,737 - pynamics.integration - INFO - finished integration
po = PointsOutput ( points , system )
po . calc ( states , t )
po . plot_time ()
po . animate ( fps = 30 , movie_name = 'glider.mp4' , lw = 2 , marker = 'o' )
2022-04-14 14:56:45,752 - pynamics.output - INFO - calculating outputs
2022-04-14 14:56:45,757 - pynamics.output - INFO - done calculating outputs
<AxesSubplot:>
from matplotlib import animation , rc
from IPython.display import HTML
HTML ( po . anim . to_html5_video ())
Your browser does not support the video tag. o1 = Output ([ E ], system , system . constant_values )
def maximize_energy ( args ):
print ( 'r: ' , args [ 0 ])
# if args[0]>1:
# return 1000
# if args[0]<=0:
# return 1000
try :
states = run ( args )
y = o1 . calc ( states , t )
perf = 1 / y [ - 1 ]
return perf
except scipy . linalg . LinAlgError :
return 1000
#best=.1
result = scipy . optimize . minimize ( maximize_energy ,[ .5 ], method = 'powell' , bounds = [( .1 , 1 )])
best = result . x
2022-04-14 14:56:52,210 - pynamics.integration - INFO - beginning integration
r: 0.5
2022-04-14 14:56:54,493 - pynamics.integration - INFO - finished integration
2022-04-14 14:56:54,494 - pynamics.output - INFO - calculating outputs
2022-04-14 14:56:54,499 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:56:54,501 - pynamics.integration - INFO - beginning integration
r: 0.4437694101250946
2022-04-14 14:56:54,723 - pynamics.system - INFO - integration at time 0000.03
2022-04-14 14:56:57,920 - pynamics.system - INFO - integration at time 0001.40
2022-04-14 14:56:59,336 - pynamics.integration - INFO - finished integration
2022-04-14 14:56:59,337 - pynamics.output - INFO - calculating outputs
2022-04-14 14:56:59,342 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:56:59,343 - pynamics.integration - INFO - beginning integration
r: 0.6562305898749052
2022-04-14 14:57:01,119 - pynamics.system - INFO - integration at time 0001.67
2022-04-14 14:57:02,468 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:02,470 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:02,475 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:02,476 - pynamics.integration - INFO - beginning integration
r: 0.7875388202501892
2022-04-14 14:57:04,293 - pynamics.system - INFO - integration at time 0001.83
2022-04-14 14:57:05,668 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:05,669 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:05,674 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:05,675 - pynamics.integration - INFO - beginning integration
r: 0.7312069994504087
2022-04-14 14:57:07,521 - pynamics.system - INFO - integration at time 0001.91
2022-04-14 14:57:08,733 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:08,734 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:08,738 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:08,739 - pynamics.integration - INFO - beginning integration
r: 0.7914957689712718
2022-04-14 14:57:10,693 - pynamics.system - INFO - integration at time 0001.56
2022-04-14 14:57:12,320 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:12,322 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:12,326 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:12,327 - pynamics.integration - INFO - beginning integration
r: 0.8069181956411859
2022-04-14 14:57:13,854 - pynamics.system - INFO - integration at time 0000.95
2022-04-14 14:57:16,083 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:16,084 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:16,089 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:16,091 - pynamics.integration - INFO - beginning integration
r: 0.8806688822970953
2022-04-14 14:57:17,067 - pynamics.system - INFO - integration at time 0000.52
2022-04-14 14:57:20,252 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:20,253 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:20,258 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:20,259 - pynamics.integration - INFO - beginning integration
2022-04-14 14:57:20,297 - pynamics.system - INFO - integration at time 0000.00
r: 0.8099243266534977
2022-04-14 14:57:23,515 - pynamics.system - INFO - integration at time 0004.30
2022-04-14 14:57:23,950 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:23,951 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:23,955 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:23,956 - pynamics.integration - INFO - beginning integration
r: 0.8104735739012696
2022-04-14 14:57:26,743 - pynamics.system - INFO - integration at time 0003.23
2022-04-14 14:57:28,073 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:28,074 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:28,079 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:28,080 - pynamics.integration - INFO - beginning integration
r: 0.8101257234702286
2022-04-14 14:57:29,944 - pynamics.system - INFO - integration at time 0002.05
2022-04-14 14:57:31,327 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:31,328 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:31,333 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:31,335 - pynamics.integration - INFO - beginning integration
r: 0.8101845153810388
2022-04-14 14:57:33,136 - pynamics.system - INFO - integration at time 0002.14
2022-04-14 14:57:34,249 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:34,249 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:34,255 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:34,256 - pynamics.integration - INFO - beginning integration
r: 0.8100699669623956
2022-04-14 14:57:36,331 - pynamics.system - INFO - integration at time 0002.62
2022-04-14 14:57:37,646 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:37,647 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:37,653 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:37,654 - pynamics.integration - INFO - beginning integration
r: 1.1202514469404572
2022-04-14 14:57:39,494 - pynamics.system - INFO - integration at time 0001.31
2022-04-14 14:57:42,152 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:42,153 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:42,159 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:42,160 - pynamics.integration - INFO - beginning integration
r: 0.44376941012509463
2022-04-14 14:57:42,697 - pynamics.system - INFO - integration at time 0000.26
2022-04-14 14:57:45,871 - pynamics.system - INFO - integration at time 0001.89
2022-04-14 14:57:47,068 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:47,069 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:47,074 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:47,076 - pynamics.integration - INFO - beginning integration
r: 0.6562305898749052
2022-04-14 14:57:49,033 - pynamics.system - INFO - integration at time 0001.97
2022-04-14 14:57:50,172 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:50,173 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:50,178 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:50,179 - pynamics.integration - INFO - beginning integration
r: 0.7875388202501892
2022-04-14 14:57:52,161 - pynamics.system - INFO - integration at time 0002.33
2022-04-14 14:57:53,314 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:53,315 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:53,320 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:53,321 - pynamics.integration - INFO - beginning integration
r: 0.7312069520431239
2022-04-14 14:57:55,293 - pynamics.system - INFO - integration at time 0002.40
2022-04-14 14:57:56,173 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:56,174 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:56,178 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:56,179 - pynamics.integration - INFO - beginning integration
r: 0.7914926866091372
2022-04-14 14:57:58,460 - pynamics.system - INFO - integration at time 0002.06
2022-04-14 14:57:59,804 - pynamics.integration - INFO - finished integration
2022-04-14 14:57:59,804 - pynamics.output - INFO - calculating outputs
2022-04-14 14:57:59,809 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:57:59,810 - pynamics.integration - INFO - beginning integration
r: 0.8069415175532193
2022-04-14 14:58:01,618 - pynamics.system - INFO - integration at time 0001.40
2022-04-14 14:58:04,275 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:04,276 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:04,280 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:04,282 - pynamics.integration - INFO - beginning integration
r: 0.8806832960314146
2022-04-14 14:58:04,825 - pynamics.system - INFO - integration at time 0000.11
2022-04-14 14:58:07,989 - pynamics.system - INFO - integration at time 0004.03
2022-04-14 14:58:08,344 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:08,344 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:08,348 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:08,350 - pynamics.integration - INFO - beginning integration
r: 0.8098990903846265
2022-04-14 14:58:11,149 - pynamics.system - INFO - integration at time 0003.57
2022-04-14 14:58:11,960 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:11,961 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:11,966 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:11,967 - pynamics.integration - INFO - beginning integration
r: 0.8104718723972292
2022-04-14 14:58:14,359 - pynamics.system - INFO - integration at time 0002.24
2022-04-14 14:58:15,138 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:15,139 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:15,144 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:15,146 - pynamics.integration - INFO - beginning integration
r: 0.8104310696166354
2022-04-14 14:58:17,574 - pynamics.system - INFO - integration at time 0002.62
2022-04-14 14:58:18,841 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:18,842 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:18,847 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:18,849 - pynamics.integration - INFO - beginning integration
r: 0.8372902498269703
2022-04-14 14:58:20,761 - pynamics.system - INFO - integration at time 0001.17
2022-04-14 14:58:23,255 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:23,256 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:23,262 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:23,263 - pynamics.integration - INFO - beginning integration
r: 0.8207155810522673
2022-04-14 14:58:23,995 - pynamics.system - INFO - integration at time 0000.21
2022-04-14 14:58:26,769 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:26,770 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:26,777 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:26,779 - pynamics.integration - INFO - beginning integration
r: 0.8143846209326022
2022-04-14 14:58:27,183 - pynamics.system - INFO - integration at time 0000.06
2022-04-14 14:58:30,412 - pynamics.system - INFO - integration at time 0003.92
2022-04-14 14:58:30,923 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:30,924 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:30,929 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:30,930 - pynamics.integration - INFO - beginning integration
r: 0.8119664093483103
2022-04-14 14:58:33,625 - pynamics.system - INFO - integration at time 0003.92
2022-04-14 14:58:34,453 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:34,454 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:34,459 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:34,461 - pynamics.integration - INFO - beginning integration
r: 0.8110427347150996
2022-04-14 14:58:36,798 - pynamics.system - INFO - integration at time 0002.20
2022-04-14 14:58:38,193 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:38,195 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:38,199 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:38,201 - pynamics.integration - INFO - beginning integration
r: 0.8106899223997591
2022-04-14 14:58:39,960 - pynamics.system - INFO - integration at time 0001.70
2022-04-14 14:58:41,897 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:41,898 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:41,904 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:41,905 - pynamics.integration - INFO - beginning integration
r: 0.8105551600869486
2022-04-14 14:58:43,160 - pynamics.system - INFO - integration at time 0000.93
2022-04-14 14:58:45,610 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:45,612 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:45,617 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:45,619 - pynamics.integration - INFO - beginning integration
r: 0.8105036854638575
2022-04-14 14:58:46,369 - pynamics.system - INFO - integration at time 0000.20
2022-04-14 14:58:49,121 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:49,123 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:49,127 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:49,128 - pynamics.integration - INFO - beginning integration
r: 0.8104933479341357
2022-04-14 14:58:49,565 - pynamics.system - INFO - integration at time 0000.07
2022-04-14 14:58:52,543 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:52,544 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:52,550 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:52,552 - pynamics.integration - INFO - beginning integration
r: 0.8105140229935793
2022-04-14 14:58:52,786 - pynamics.system - INFO - integration at time 0000.02
2022-04-14 14:58:56,054 - pynamics.system - INFO - integration at time 0003.86
2022-04-14 14:58:56,862 - pynamics.integration - INFO - finished integration
2022-04-14 14:58:56,864 - pynamics.output - INFO - calculating outputs
2022-04-14 14:58:56,868 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:58:56,869 - pynamics.integration - INFO - beginning integration
r: 0.4437694101250946
2022-04-14 14:58:59,249 - pynamics.system - INFO - integration at time 0001.07
2022-04-14 14:59:01,645 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:01,645 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:01,649 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:01,651 - pynamics.integration - INFO - beginning integration
r: 0.6562305898749053
2022-04-14 14:59:02,409 - pynamics.system - INFO - integration at time 0000.26
2022-04-14 14:59:04,797 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:04,798 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:04,802 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:04,804 - pynamics.integration - INFO - beginning integration
r: 0.7875388202501892
2022-04-14 14:59:05,607 - pynamics.system - INFO - integration at time 0000.27
2022-04-14 14:59:07,971 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:07,972 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:07,976 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:07,978 - pynamics.integration - INFO - beginning integration
r: 0.7312069984594256
2022-04-14 14:59:08,773 - pynamics.system - INFO - integration at time 0000.35
2022-04-14 14:59:11,001 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:11,002 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:11,006 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:11,007 - pynamics.integration - INFO - beginning integration
r: 0.7914958362564721
2022-04-14 14:59:11,957 - pynamics.system - INFO - integration at time 0000.34
2022-04-14 14:59:14,553 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:14,553 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:14,558 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:14,559 - pynamics.integration - INFO - beginning integration
r: 0.8069190967450603
2022-04-14 14:59:15,097 - pynamics.system - INFO - integration at time 0000.12
2022-04-14 14:59:18,070 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:18,071 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:18,077 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:18,079 - pynamics.integration - INFO - beginning integration
r: 0.8806694392099171
2022-04-14 14:59:18,280 - pynamics.system - INFO - integration at time 0000.01
2022-04-14 14:59:21,416 - pynamics.system - INFO - integration at time 0004.24
2022-04-14 14:59:21,921 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:21,922 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:21,927 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:21,929 - pynamics.integration - INFO - beginning integration
r: 0.8099491469080832
2022-04-14 14:59:24,616 - pynamics.system - INFO - integration at time 0003.46
2022-04-14 14:59:25,528 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:25,529 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:25,533 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:25,535 - pynamics.integration - INFO - beginning integration
r: 0.8103868887719312
2022-04-14 14:59:27,820 - pynamics.system - INFO - integration at time 0002.84
2022-04-14 14:59:28,968 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:28,969 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:28,974 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:28,975 - pynamics.integration - INFO - beginning integration
r: 0.8103223280969174
2022-04-14 14:59:31,102 - pynamics.system - INFO - integration at time 0001.41
2022-04-14 14:59:33,213 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:33,215 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:33,219 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:33,220 - pynamics.integration - INFO - beginning integration
r: 0.837232434223213
2022-04-14 14:59:34,398 - pynamics.system - INFO - integration at time 0000.61
2022-04-14 14:59:37,348 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:37,349 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:37,353 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:37,355 - pynamics.integration - INFO - beginning integration
r: 0.8206409746877907
2022-04-14 14:59:37,689 - pynamics.system - INFO - integration at time 0000.04
2022-04-14 14:59:40,931 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:40,932 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:40,936 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:40,937 - pynamics.integration - INFO - beginning integration
2022-04-14 14:59:40,942 - pynamics.system - INFO - integration at time 0000.00
r: 0.814303601068228
2022-04-14 14:59:44,036 - pynamics.system - INFO - integration at time 0003.79
2022-04-14 14:59:44,318 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:44,319 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:44,323 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:44,324 - pynamics.integration - INFO - beginning integration
r: 0.811882939744962
2022-04-14 14:59:47,130 - pynamics.system - INFO - integration at time 0003.38
2022-04-14 14:59:48,337 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:48,338 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:48,343 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:48,344 - pynamics.integration - INFO - beginning integration
r: 0.8109583293947266
2022-04-14 14:59:50,244 - pynamics.system - INFO - integration at time 0001.70
2022-04-14 14:59:51,813 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:51,814 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:51,818 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:51,819 - pynamics.integration - INFO - beginning integration
r: 0.8106051596672866
2022-04-14 14:59:53,402 - pynamics.system - INFO - integration at time 0001.23
2022-04-14 14:59:55,813 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:55,814 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:55,819 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:55,820 - pynamics.integration - INFO - beginning integration
r: 0.8104397247458821
2022-04-14 14:59:56,568 - pynamics.system - INFO - integration at time 0000.20
2022-04-14 14:59:59,972 - pynamics.integration - INFO - finished integration
2022-04-14 14:59:59,974 - pynamics.output - INFO - calculating outputs
2022-04-14 14:59:59,978 - pynamics.output - INFO - done calculating outputs
2022-04-14 14:59:59,979 - pynamics.integration - INFO - beginning integration
2022-04-14 15:00:00,108 - pynamics.system - INFO - integration at time 0000.00
r: 0.8105029152629325
2022-04-14 15:00:03,263 - pynamics.system - INFO - integration at time 0004.15
2022-04-14 15:00:04,134 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:04,135 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:04,139 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:04,140 - pynamics.integration - INFO - beginning integration
r: 0.8104638613756288
2022-04-14 15:00:06,389 - pynamics.system - INFO - integration at time 0002.32
2022-04-14 15:00:07,435 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:07,436 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:07,441 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:07,442 - pynamics.integration - INFO - beginning integration
r: 0.8104195431996616
2022-04-14 15:00:09,556 - pynamics.system - INFO - integration at time 0002.16
2022-04-14 15:00:11,179 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:11,180 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:11,185 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:11,186 - pynamics.integration - INFO - beginning integration
r: 0.8104489441180714
2022-04-14 15:00:12,680 - pynamics.system - INFO - integration at time 0001.00
2022-04-14 15:00:14,556 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:14,558 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:14,563 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:14,565 - pynamics.integration - INFO - beginning integration
r: 0.8104320160811714
2022-04-14 15:00:15,806 - pynamics.system - INFO - integration at time 0000.78
2022-04-14 15:00:18,516 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:18,517 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:18,522 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:18,524 - pynamics.integration - INFO - beginning integration
r: 0.8104432462327036
2022-04-14 15:00:18,979 - pynamics.system - INFO - integration at time 0000.08
2022-04-14 15:00:22,083 - pynamics.system - INFO - integration at time 0004.80
2022-04-14 15:00:22,146 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:22,147 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:22,152 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:22,153 - pynamics.integration - INFO - beginning integration
r: 0.8104367802979705
2022-04-14 15:00:25,229 - pynamics.system - INFO - integration at time 0004.61
2022-04-14 15:00:25,655 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:25,657 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:25,662 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:25,663 - pynamics.integration - INFO - beginning integration
r: 0.810441069834157
2022-04-14 15:00:28,313 - pynamics.system - INFO - integration at time 0003.83
2022-04-14 15:00:28,825 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:28,826 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:28,831 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:28,832 - pynamics.integration - INFO - beginning integration
r: 0.810438600066858
2022-04-14 15:00:31,414 - pynamics.system - INFO - integration at time 0003.18
2022-04-14 15:00:32,038 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:32,039 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:32,043 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:32,044 - pynamics.integration - INFO - beginning integration
r: 0.8104402385238852
2022-04-14 15:00:34,497 - pynamics.system - INFO - integration at time 0003.51
2022-04-14 15:00:35,374 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:35,375 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:35,379 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:35,380 - pynamics.integration - INFO - beginning integration
r: 0.8104392951567214
2022-04-14 15:00:37,565 - pynamics.system - INFO - integration at time 0002.47
2022-04-14 15:00:38,581 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:38,582 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:38,587 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:38,588 - pynamics.integration - INFO - beginning integration
r: 0.8104399209916167
2022-04-14 15:00:40,622 - pynamics.system - INFO - integration at time 0002.04
2022-04-14 15:00:42,475 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:42,476 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:42,480 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:42,481 - pynamics.integration - INFO - beginning integration
r: 0.810439560657424
2022-04-14 15:00:43,800 - pynamics.system - INFO - integration at time 0000.78
2022-04-14 15:00:46,411 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:46,412 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:46,416 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:46,417 - pynamics.integration - INFO - beginning integration
r: 0.8104397997050826
2022-04-14 15:00:47,219 - pynamics.system - INFO - integration at time 0000.26
2022-04-14 15:00:50,196 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:50,197 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:50,202 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:50,203 - pynamics.integration - INFO - beginning integration
2022-04-14 15:00:50,345 - pynamics.system - INFO - integration at time 0000.01
r: 0.8104396620696682
2022-04-14 15:00:53,445 - pynamics.system - INFO - integration at time 0004.63
2022-04-14 15:00:53,860 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:53,861 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:53,866 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:53,867 - pynamics.integration - INFO - beginning integration
r: 0.810439753377749
2022-04-14 15:00:56,583 - pynamics.system - INFO - integration at time 0003.62
2022-04-14 15:00:57,304 - pynamics.integration - INFO - finished integration
2022-04-14 15:00:57,305 - pynamics.output - INFO - calculating outputs
2022-04-14 15:00:57,309 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:00:57,310 - pynamics.integration - INFO - beginning integration
r: 0.8104397008056987
2022-04-14 15:00:59,681 - pynamics.system - INFO - integration at time 0002.21
2022-04-14 15:01:01,018 - pynamics.integration - INFO - finished integration
2022-04-14 15:01:01,018 - pynamics.output - INFO - calculating outputs
2022-04-14 15:01:01,023 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:01:01,024 - pynamics.integration - INFO - beginning integration
r: 0.8104396860098517
2022-04-14 15:01:02,816 - pynamics.system - INFO - integration at time 0001.62
2022-04-14 15:01:04,660 - pynamics.integration - INFO - finished integration
2022-04-14 15:01:04,661 - pynamics.output - INFO - calculating outputs
2022-04-14 15:01:04,666 - pynamics.output - INFO - done calculating outputs
2022-04-14 15:01:04,673 - pynamics.integration - INFO - beginning integration
<lambdifygenerated-1>:2: VisibleDeprecationWarning: Creating an ndarray from ragged nested sequences (which is a list-or-tuple of lists-or-tuples-or ndarrays with different lengths or shapes) is deprecated. If you meant to do this, you must specify 'dtype=object' when creating the ndarray.
return array([[0.314159265358979*r**2, 0, 0, 0, 0, 0], [0, 0.314159265358979*r**2, 0, 0, 0, 0], [0, 0, 0.314159265358979*r**2, 0, 0, 0], [0, 0, 0, I_11*sin(qB)**2 + (I_11*sin(qC)**2*cos(qB) + I_11*cos(qB)*cos(qC)**2)*cos(qB), 0, I_11*sin(qB)], [0, 0, 0, 0, I_11*sin(qC)**2 + I_11*cos(qC)**2, 0], [0, 0, 0, I_11*sin(qB), 0, I_11]])
<lambdifygenerated-2>:2: VisibleDeprecationWarning: Creating an ndarray from ragged nested sequences (which is a list-or-tuple of lists-or-tuples-or ndarrays with different lengths or shapes) is deprecated. If you meant to do this, you must specify 'dtype=object' when creating the ndarray.
return array([[-6.28318530717959*r**2*rho*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*cos(qB) + 6.28318530717959*r**2*rho*(-lw*(qA_d*sin(qB) + qC_d) - x_d*sin(qC)*cos(qB) + (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*sin(qC) + (y_d*cos(qA) + z_d*sin(qA))*cos(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qC)*cos(qB) - 0.00628318530717959*rho*(sin(qE)*sin(qC) + cos(qE)*cos(qC))*(l*(qA_d*sin(qB) + qC_d)*sin(qE) + (y_d*cos(qA) + z_d*sin(qA))*(-sin(qE)*cos(qC) + sin(qC)*cos(qE)) + (sin(qE)*sin(qC) + cos(qE)*cos(qC))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*cos(qB) - 0.00628318530717959*rho*(x_d*cos(qB)*cos(qC) - (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*cos(qC) + (y_d*cos(qA) + z_d*sin(qA))*sin(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*cos(qB)*cos(qC)], [-0.314159265358979*g*r**2 - 6.28318530717959*r**2*rho*(sin(qE)*sin(qC) + cos(qE)*cos(qC))*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*cos(qA) - 6.28318530717959*r**2*rho*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA)*sin(qB) + 6.28318530717959*r**2*rho*(-lw*(qA_d*sin(qB) + qC_d) - x_d*sin(qC)*cos(qB) + (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*sin(qC) + (y_d*cos(qA) + z_d*sin(qA))*cos(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA)*sin(qB)*sin(qC) - 6.28318530717959*r**2*rho*(-lw*(qA_d*sin(qB) + qC_d) - x_d*sin(qC)*cos(qB) + (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*sin(qC) + (y_d*cos(qA) + z_d*sin(qA))*cos(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*cos(qA)*cos(qC) - 0.00628318530717959*rho*(sin(qE)*sin(qC) + cos(qE)*cos(qC))*(l*(qA_d*sin(qB) + qC_d)*sin(qE) + (y_d*cos(qA) + z_d*sin(qA))*(-sin(qE)*cos(qC) + sin(qC)*cos(qE)) + (sin(qE)*sin(qC) + cos(qE)*cos(qC))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA)*sin(qB) - 0.00628318530717959*rho*(-sin(qE)*cos(qC) + sin(qC)*cos(qE))*(l*(qA_d*sin(qB) + qC_d)*sin(qE) + (y_d*cos(qA) + z_d*sin(qA))*(-sin(qE)*cos(qC) + sin(qC)*cos(qE)) + (sin(qE)*sin(qC) + cos(qE)*cos(qC))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*cos(qA) - 0.00628318530717959*rho*(x_d*cos(qB)*cos(qC) - (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*cos(qC) + (y_d*cos(qA) + z_d*sin(qA))*sin(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA)*sin(qB)*cos(qC) - 0.00628318530717959*rho*(x_d*cos(qB)*cos(qC) - (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*cos(qC) + (y_d*cos(qA) + z_d*sin(qA))*sin(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qC)*cos(qA)], [-6.28318530717959*r**2*rho*(sin(qE)*sin(qC) + cos(qE)*cos(qC))*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA) + 6.28318530717959*r**2*rho*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qB)*cos(qA) - 6.28318530717959*r**2*rho*(-lw*(qA_d*sin(qB) + qC_d) - x_d*sin(qC)*cos(qB) + (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*sin(qC) + (y_d*cos(qA) + z_d*sin(qA))*cos(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA)*cos(qC) - 6.28318530717959*r**2*rho*(-lw*(qA_d*sin(qB) + qC_d) - x_d*sin(qC)*cos(qB) + (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*sin(qC) + (y_d*cos(qA) + z_d*sin(qA))*cos(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qB)*sin(qC)*cos(qA) + 0.00628318530717959*rho*(sin(qE)*sin(qC) + cos(qE)*cos(qC))*(l*(qA_d*sin(qB) + qC_d)*sin(qE) + (y_d*cos(qA) + z_d*sin(qA))*(-sin(qE)*cos(qC) + sin(qC)*cos(qE)) + (sin(qE)*sin(qC) + cos(qE)*cos(qC))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qB)*cos(qA) - 0.00628318530717959*rho*(-sin(qE)*cos(qC) + sin(qC)*cos(qE))*(l*(qA_d*sin(qB) + qC_d)*sin(qE) + (y_d*cos(qA) + z_d*sin(qA))*(-sin(qE)*cos(qC) + sin(qC)*cos(qE)) + (sin(qE)*sin(qC) + cos(qE)*cos(qC))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA) - 0.00628318530717959*rho*(x_d*cos(qB)*cos(qC) - (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*cos(qC) + (y_d*cos(qA) + z_d*sin(qA))*sin(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qA)*sin(qC) + 0.00628318530717959*rho*(x_d*cos(qB)*cos(qC) - (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*cos(qC) + (y_d*cos(qA) + z_d*sin(qA))*sin(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qB)*cos(qA)*cos(qC)], [-I_11*qA_d*qB_d*sin(qB)*cos(qB) + 6.28318530717959*l*r**2*rho*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qB)*cos(qE) - 0.00628318530717959*l*rho*(l*(qA_d*sin(qB) + qC_d)*sin(qE) + (y_d*cos(qA) + z_d*sin(qA))*(-sin(qE)*cos(qC) + sin(qC)*cos(qE)) + (sin(qE)*sin(qC) + cos(qE)*cos(qC))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qE)*sin(qB) + 6.28318530717959*le*r**2*rho*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qB) + 6.28318530717959*lw*r**2*rho*(-lw*(qA_d*sin(qB) + qC_d) - x_d*sin(qC)*cos(qB) + (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*sin(qC) + (y_d*cos(qA) + z_d*sin(qA))*cos(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qB) + qB_d*(-I_11*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qC) + I_11*(qA_d*cos(qB)*cos(qC) + qB_d*sin(qC))*cos(qC))*sin(qB) - (I_11*qB_d*(qA_d*sin(qB) + qC_d) - qC_d*(I_11*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qC) + I_11*(qA_d*cos(qB)*cos(qC) + qB_d*sin(qC))*sin(qC)))*cos(qB) - (-I_11*(qA_d*qB_d*sin(qB)*sin(qC) - qA_d*qC_d*cos(qB)*cos(qC) - qB_d*qC_d*sin(qC))*sin(qC) + I_11*(-qA_d*qB_d*sin(qB)*cos(qC) - qA_d*qC_d*sin(qC)*cos(qB) + qB_d*qC_d*cos(qC))*cos(qC))*cos(qB)], [-I_11*(qA_d*qB_d*sin(qB)*sin(qC) - qA_d*qC_d*cos(qB)*cos(qC) - qB_d*qC_d*sin(qC))*cos(qC) - I_11*(-qA_d*qB_d*sin(qB)*cos(qC) - qA_d*qC_d*sin(qC)*cos(qB) + qB_d*qC_d*cos(qC))*sin(qC) + qA_d*(I_11*(qA_d*sin(qB) + qC_d)*cos(qB) + I_11*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)*sin(qC) - I_11*(qA_d*cos(qB)*cos(qC) + qB_d*sin(qC))*sin(qB)*cos(qC)) - qC_d*(-I_11*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qC) + I_11*(qA_d*cos(qB)*cos(qC) + qB_d*sin(qC))*cos(qC))], [-I_11*qA_d*qB_d*cos(qB) + 6.28318530717959*l*r**2*rho*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*cos(qE) - 0.00628318530717959*l*rho*(l*(qA_d*sin(qB) + qC_d)*sin(qE) + (y_d*cos(qA) + z_d*sin(qA))*(-sin(qE)*cos(qC) + sin(qC)*cos(qE)) + (sin(qE)*sin(qC) + cos(qE)*cos(qC))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB)))*sin(qE) + 6.28318530717959*le*r**2*rho*(-l*(qA_d*sin(qB) + qC_d)*cos(qE) - le*(qA_d*sin(qB) + qC_d) + (y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) + (sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)))*sqrt(l**2*(qA_d*sin(qB) + qC_d)**2 + l**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 + 2*l*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC)) + 2*l*le*(qA_d*sin(qB) + qC_d)**2*cos(qE) - 2*l*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + l*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + le**2*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))**2 + le**2*(qA_d*sin(qB) + qC_d)**2 + 2*le*(qA_d*(sin(qE)*cos(qB)*cos(qC) - sin(qC)*cos(qE)*cos(qB)) + qB_d*(sin(qE)*sin(qC) + cos(qE)*cos(qC)))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) - 2*le*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*(sin(qE)*sin(qC) + cos(qE)*cos(qC)) - 2*le*(qA_d*sin(qB) + qC_d)*(sin(qE)*cos(qC) - sin(qC)*cos(qE))*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA)) + x_d**2 + x_d*(l*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-l*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + l*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB))) + 6.28318530717959*lw*r**2*rho*(-lw*(qA_d*sin(qB) + qC_d) - x_d*sin(qC)*cos(qB) + (-y_d*sin(qA) + z_d*cos(qA))*sin(qB)*sin(qC) + (y_d*cos(qA) + z_d*sin(qA))*cos(qC))*sqrt(lw**2*(qA_d*sin(qB) + qC_d)**2 + lw**2*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))**2 - 2*lw*(qA_d*sin(qB) + qC_d)*(y_d*cos(qA) + z_d*sin(qA))*cos(qC) + lw*(qA_d*sin(qB) + qC_d)*(x_d*cos(qB) + y_d*sin(qA)*sin(qB) - z_d*sin(qB)*cos(qA))*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*(x_d*sin(qB) - y_d*sin(qA)*cos(qB) + z_d*cos(qA)*cos(qB)) + x_d**2 + x_d*(lw*(qA_d*sin(qB) + qC_d)*sin(qC)*cos(qB) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qB)) + y_d**2 + z_d**2 + (-y_d*sin(qA) + z_d*cos(qA))*(-lw*(qA_d*sin(qB) + qC_d)*sin(qB)*sin(qC) + lw*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qB))) - qA_d*(I_11*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*cos(qC) + I_11*(qA_d*cos(qB)*cos(qC) + qB_d*sin(qC))*sin(qC))*cos(qB) + qB_d*(-I_11*(-qA_d*sin(qC)*cos(qB) + qB_d*cos(qC))*sin(qC) + I_11*(qA_d*cos(qB)*cos(qC) + qB_d*sin(qC))*cos(qC))]])
2022-04-14 15:01:06,049 - pynamics.system - INFO - integration at time 0000.79
2022-04-14 15:01:08,705 - pynamics.integration - INFO - finished integration
po = PointsOutput ( points , system )
po . calc ( states , t )
po . plot_time ()
po . animate ( fps = 30 , movie_name = 'glider.mp4' , lw = 2 , marker = 'o' )
2022-04-14 15:01:08,721 - pynamics.output - INFO - calculating outputs
2022-04-14 15:01:08,726 - pynamics.output - INFO - done calculating outputs
<AxesSubplot:>
from matplotlib import animation , rc
from IPython.display import HTML
HTML ( po . anim . to_html5_video ())
Your browser does not support the video tag.