import shapely.geometry as sg
from foldable_robotics.layer import Layer
from foldable_robotics.laminate import Laminate
c.union((c.translate(.5,.5)))
d = Layer(a.buffer(.25))
d
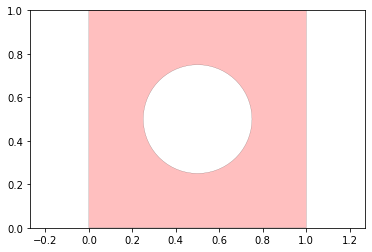
e = c-d.translate(.5,.5)
e
import foldable_robotics
foldable_robotics.resolution=4
e.dilate(.2)
[(0.5, 0.5)]
d.bounding_box().plot()
d.plot()
f = Laminate(e<<.1,e, e>>.1)
f
[1, 2, 3]
[3, 2, 1]
6
[1, 2, 3, 4, 5, 6]
f.symmetric_difference(h)
import foldable_robotics.manufacturing as fm
k = fm.unary_union(f)
k
l = (k<<.2).bounding_box()
m = Laminate(l,l,l)
m
# this can kill jupyter so do it last in your script or comment it out
f.plot_3d()
An exception has occurred, use %tb to see the full traceback.
SystemExit: 0
C:\Anaconda3\lib\site-packages\IPython\core\interactiveshell.py:3445: UserWarning: To exit: use 'exit', 'quit', or Ctrl-D.
warn("To exit: use 'exit', 'quit', or Ctrl-D.", stacklevel=1)