"""
Written by Daniel M. Aukes
Email: danaukes<at>gmail.com
Please see LICENSE for full license.
"""
'\nWritten by Daniel M. Aukes\nEmail: danaukes<at>gmail.com\nPlease see LICENSE for full license.\n'
import pynamics
from pynamics.frame import Frame
import idealab_tools.units
from pynamics.variable_types import Differentiable , Constant
from pynamics.system import System
from pynamics.body import Body
from pynamics.dyadic import Dyadic
from pynamics.output import Output , PointsOutput
from pynamics.particle import Particle
import pynamics.integration
from pynamics.constraint import KinematicConstraint , AccelerationConstraint
import sympy
import numpy
import matplotlib.pyplot as plt
plt . ion ()
from math import pi
system = System ()
pynamics . set_system ( __name__ , system )
idealab_tools . units . Unit . set_scaling ( meter = 1 )
lA = Constant ( 1.1 * idealab_tools . units . length , 'lA' , system )
lB = Constant ( 1 * idealab_tools . units . length , 'lB' , system )
lC = Constant ( .9 * idealab_tools . units . length , 'lC' , system )
lD = Constant ( 1.01 * idealab_tools . units . length , 'lD' , system )
m = Constant ( 1 * idealab_tools . units . mass , 'm' , system )
g = Constant ( 9.81 * idealab_tools . units . acceleration , 'g' , system )
Ixx_A = Constant ( 1 * idealab_tools . units . inertia , 'Ixx_A' , system )
Iyy_A = Constant ( 1 * idealab_tools . units . inertia , 'Iyy_A' , system )
Izz_A = Constant ( 1 * idealab_tools . units . inertia , 'Izz_A' , system )
Ixx_B = Constant ( 1 * idealab_tools . units . inertia , 'Ixx_B' , system )
Iyy_B = Constant ( 1 * idealab_tools . units . inertia , 'Iyy_B' , system )
Izz_B = Constant ( 1 * idealab_tools . units . inertia , 'Izz_B' , system )
Ixx_C = Constant ( 1 * idealab_tools . units . inertia , 'Ixx_C' , system )
Iyy_C = Constant ( 1 * idealab_tools . units . inertia , 'Iyy_C' , system )
Izz_C = Constant ( 1 * idealab_tools . units . inertia , 'Izz_C' , system )
Ixx_D = Constant ( 1 * idealab_tools . units . inertia , 'Ixx_D' , system )
Iyy_D = Constant ( 1 * idealab_tools . units . inertia , 'Iyy_D' , system )
Izz_D = Constant ( 1 * idealab_tools . units . inertia , 'Izz_D' , system )
qA , qA_d , qA_dd = Differentiable ( 'qA' , system )
qB , qB_d , qB_dd = Differentiable ( 'qB' , system )
qC , qC_d , qC_dd = Differentiable ( 'qC' , system )
qD , qD_d , qD_dd = Differentiable ( 'qD' , system )
initialvalues = {}
initialvalues [ qA ] = 20 * pi / 180 * idealab_tools . units . radian
initialvalues [ qA_d ] = 0 * pi / 180 * idealab_tools . units . rotational_speed
initialvalues [ qB ] = 90 * pi / 180 * idealab_tools . units . radian
initialvalues [ qB_d ] = 0 * pi / 180 * idealab_tools . units . rotational_speed
initialvalues [ qC ] = 140 * pi / 180 * idealab_tools . units . radian
initialvalues [ qC_d ] = 0 * pi / 180 * idealab_tools . units . rotational_speed
initialvalues [ qD ] =- 90 * pi / 180 * idealab_tools . units . radian
initialvalues [ qD_d ] = 0 * pi / 180 * idealab_tools . units . rotational_speed
statevariables = system . get_state_variables ()
N = Frame ( 'N' , system )
A = Frame ( 'A' , system )
B = Frame ( 'B' , system )
C = Frame ( 'C' , system )
D = Frame ( 'D' , system )
A . rotate_fixed_axis ( N ,[ 0 , 0 , 1 ], qA , system )
B . rotate_fixed_axis ( A ,[ 0 , 0 , 1 ], qB , system )
C . rotate_fixed_axis ( N ,[ 0 , 0 , 1 ], qC , system )
D . rotate_fixed_axis ( C ,[ 0 , 0 , 1 ], qD , system )
pNA = 0 * N . x
pAB = pNA + lA * A . x
pBD = pAB + lB * B . x
pCD = pNA + lC * C . x
pDB = pCD + lD * D . x
points = [ pBD , pAB , pNA , pCD , pDB ]
statevariables = system . get_state_variables ()
ini0 = [ initialvalues [ item ] for item in statevariables ]
eq = []
eq . append ( pBD - pDB )
eq_scalar = []
eq_scalar . append ( eq [ 0 ] . dot ( N . x ))
eq_scalar . append ( eq [ 0 ] . dot ( N . y ))
c = KinematicConstraint ( eq_scalar )
constant_states = list ( set ( system . get_q ( 0 )) - set ( variables ))
constants = system . constant_values . copy ()
for key in constant_states :
constants [ key ] = initialvalues [ key ]
guess = [ initialvalues [ item ] for item in variables ]
result = c . solve_numeric ( variables , guess , constants )
ini = []
for item in system . get_state_variables ():
if item in variables :
ini . append ( result [ item ])
else :
ini . append ( initialvalues [ item ])
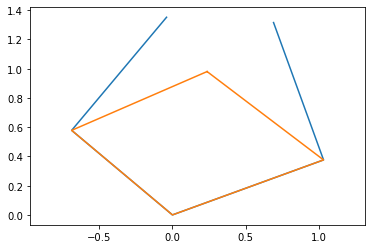
points = PointsOutput ( points , constant_values = system . constant_values )
points . calc ( numpy . array ([ ini0 , ini ]),[ 0 , 1 ])
points . plot_time ()
2022-03-02 15:15:58,654 - pynamics.output - INFO - calculating outputs
2022-03-02 15:15:58,657 - pynamics.output - INFO - done calculating outputs
<AxesSubplot:>
pAcm = pNA + lA / 2 * A . x
pBcm = pAB + lB / 2 * B . x
pCcm = pNA + lC / 2 * C . x
pDcm = pCD + lD / 2 * D . x
IA = Dyadic . build ( A , Ixx_A , Iyy_A , Izz_A )
IB = Dyadic . build ( B , Ixx_B , Iyy_B , Izz_B )
IC = Dyadic . build ( C , Ixx_C , Iyy_C , Izz_C )
ID = Dyadic . build ( D , Ixx_D , Iyy_D , Izz_D )
BodyA = Body ( 'BodyA' , A , pAcm , m , IA , system )
BodyB = Body ( 'BodyB' , B , pBcm , m , IB , system )
BodyC = Body ( 'BodyC' , C , pCcm , m , IC , system )
BodyC = Body ( 'BodyC' , D , pDcm , m , ID , system )
#BodyA = Particle(pAcm,m,'ParticleA',system)
#BodyB = Particle(pBcm,m,'ParticleB',system)
#BodyC = Particle(pCcm,m,'ParticleC',system)
#BodyD = Particle(pDcm,m,'ParticleD',system)
system . addforcegravity ( - g * N . y )
eq_d = [ item . time_derivative () for item in eq ]
eq_dd = [ item . time_derivative () for item in eq_d ]
eq_dd_scalar = []
eq_dd_scalar . append ( eq_dd [ 0 ] . dot ( N . x ))
eq_dd_scalar . append ( eq_dd [ 0 ] . dot ( N . y ))
system . add_constraint ( AccelerationConstraint ( eq_dd_scalar ))
f , ma = system . getdynamics ()
func1 = system . state_space_post_invert ( f , ma )
2022-03-02 15:15:59,007 - pynamics.system - INFO - getting dynamic equations
2022-03-02 15:15:59,295 - pynamics.system - INFO - solving a = f/m and creating function
2022-03-02 15:15:59,356 - pynamics.system - INFO - substituting constrained in Ma-f.
2022-03-02 15:15:59,450 - pynamics.system - INFO - done solving a = f/m and creating function
fps = 30 / ( 1 * idealab_tools . units . time )
tinitial = 0 * idealab_tools . units . time
tfinal = 5 * idealab_tools . units . time
tstep = 1 / fps
t = numpy . r_ [ tinitial : tfinal : tstep ]
tolerance = 1e-12
states = pynamics . integration . integrate_odeint ( func1 , ini , t , rtol = tolerance , atol = tolerance , args = ({ 'constants' : system . constant_values },))
2022-03-02 15:15:59,470 - pynamics.integration - INFO - beginning integration
2022-03-02 15:15:59,471 - pynamics.system - INFO - integration at time 0000.00
2022-03-02 15:15:59,740 - pynamics.system - INFO - integration at time 0001.00
2022-03-02 15:15:59,995 - pynamics.system - INFO - integration at time 0001.79
2022-03-02 15:16:00,248 - pynamics.system - INFO - integration at time 0004.10
2022-03-02 15:16:00,419 - pynamics.integration - INFO - finished integration
KE = system . get_KE ()
PE = system . getPEGravity ( pNA ) - system . getPESprings ()
points . calc ( states , t )
points . plot_time ()
2022-03-02 15:16:00,439 - pynamics.output - INFO - calculating outputs
2022-03-02 15:16:00,445 - pynamics.output - INFO - done calculating outputs
<AxesSubplot:>
points . animate ( fps = fps , movie_name = 'four_bar.mp4' , lw = 2 )
<AxesSubplot:>
from matplotlib import animation , rc
from IPython.display import HTML
HTML ( points . anim . to_html5_video ())
Your browser does not support the video tag.