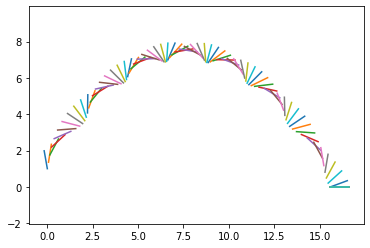
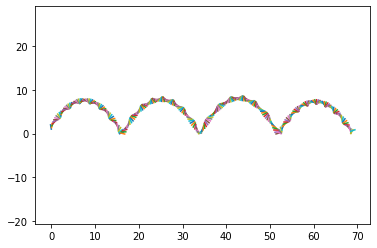
This example shows how to implement contact and friction using a penalty method and damping
# -*- coding: utf-8 -*-
"""
Written by Daniel M. Aukes
Email: danaukes<at>gmail.com
Please see LICENSE for full license.
"""
import sympy
sympy.init_printing(pretty_print=False)
import pynamics
from pynamics.frame import Frame
from pynamics.variable_types import Differentiable,Constant,Variable
from pynamics.system import System
from pynamics.body import Body
from pynamics.dyadic import Dyadic
from pynamics.output import Output,PointsOutput
from pynamics.particle import Particle
import pynamics.integration
import pynamics.tanh
import sympy
import numpy
import matplotlib.pyplot as plt
plt.ion()
from math import pi
system = System()
pynamics.set_system(__name__,system)
tol = 1e-4
error_tol = 1e-10
m1 = Constant(1e0,'m1',system)
m2 = Constant(1e0,'m2',system)
l0 = Constant(1,'l0',system)
g = Constant(9.81,'g',system)
k_constraint = Constant(1e4,'k_constraint',system)
b_constraint = Constant(1e5,'b_constraint',system)
tinitial = 0
tfinal = 10
fps = 30
tstep = 1/fps
t = numpy.r_[tinitial:tfinal:tstep]
x1,x1_d,x1_dd = Differentiable('x1',system)
y1,y1_d,y1_dd = Differentiable('y1',system)
q1,q1_d,q1_dd = Differentiable('q1',system)
vini = 5
aini = -60*pi/180
initialvalues = {}
initialvalues[x1]=0
initialvalues[x1_d]=2
initialvalues[y1]=1
initialvalues[y1_d]=10
initialvalues[q1]=10*pi/180
initialvalues[q1_d]=-10
statevariables = system.get_state_variables()
ini = [initialvalues[item] for item in statevariables]
N = Frame('N')
system.set_newtonian(N)
A = Frame('A')
A.rotate_fixed_axis_directed(N,[0,0,1],q1)
pNA=0*N.x
pm1 = x1*N.x + y1*N.y
pm2 = pm1+l0*A.y
Particle1 = Particle(pm1,m1,'Particle1',system)
Particle2 = Particle(pm2,m2,'Particle2',system)
vpm1 = pm1.time_derivative(N,system)
vpm2 = pm2.time_derivative(N,system)
system.addforcegravity(-g*N.y)
y2 = pm2.dot(N.y)
f_floor2 = (y2**2)**.5 - y2
f_floor2_d = system.derivative(f_floor2)
system.addforce(-k_constraint*f_floor2*-N.y,vpm2)
system.addforce(-b_constraint*f_floor2*vpm2,vpm2)
#system.addforce(-b_constraint*f_floor2*f_floor2_d*-N.y,vpm2)
<pynamics.force.Force at 0x7f59f397e750>
f_floor1 = (y1**2)**.5 - y1
f_floor1_d = system.derivative(f_floor1)
system.addforce(-k_constraint*f_floor1*-N.y,vpm1)
system.addforce(-b_constraint*f_floor1*vpm1,vpm1)
#system.addforce(-b_constraint*f_floor1*f_floor1_d*-N.y,vpm1)
<pynamics.force.Force at 0x7f59f3989410>
eq = []
f,ma = system.getdynamics()
func = system.state_space_post_invert(f,ma)
constants = system.constant_values.copy()
# constants[b_constraint]=0
states=pynamics.integration.integrate_odeint(func,ini,t,rtol = tol, atol = tol, args=({'constants':constants},))
points = [pm1,pm2]
po = PointsOutput(points, system, constant_values=system.constant_values)
po.calc(states)
constants = system.constant_values.copy()
constants[b_constraint]=1e3
states=pynamics.integration.integrate_odeint(func,ini,t,rtol = tol, atol = tol, args=({'constants':constants},))
points = [pm1,pm2]
po2 = PointsOutput(points, system, constant_values=system.constant_values)
po2.calc(states)
constants[b_constraint]=0
states=pynamics.integration.integrate_odeint(func,ini,t,rtol = tol, atol = tol, args=({'constants':constants},))
points = [pm1,pm2]
po3 = PointsOutput(points, system, constant_values=system.constant_values)
po3.calc(states)
po.plot_time()
po.animate(fps = fps, movie_name='bouncy-mod1.mp4',lw=2,marker='o')
po2.plot_time()
po2.animate(fps = fps, movie_name='bouncy-mod2.mp4',lw=2,marker='o')
po3.plot_time()
po3.animate(fps = fps, movie_name='bouncy-mod3.mp4',lw=2,marker='o')
2021-03-08 16:16:41,176 - pynamics.system - INFO - getting dynamic equations
2021-03-08 16:16:41,233 - pynamics.system - INFO - solving a = f/m and creating function
2021-03-08 16:16:41,236 - pynamics.system - INFO - substituting constrained in Ma-f.
2021-03-08 16:16:41,370 - pynamics.system - INFO - done solving a = f/m and creating function
2021-03-08 16:16:41,434 - pynamics.integration - INFO - beginning integration
2021-03-08 16:16:41,435 - pynamics.system - INFO - integration at time 0000.00
2021-03-08 16:16:41,648 - pynamics.integration - INFO - finished integration
2021-03-08 16:16:41,656 - pynamics.output - INFO - calculating outputs
2021-03-08 16:16:41,660 - pynamics.output - INFO - done calculating outputs
2021-03-08 16:16:41,662 - pynamics.integration - INFO - beginning integration
2021-03-08 16:16:41,720 - pynamics.system - INFO - integration at time 0002.33
2021-03-08 16:16:41,949 - pynamics.system - INFO - integration at time 0005.39
2021-03-08 16:16:42,176 - pynamics.system - INFO - integration at time 0006.96
2021-03-08 16:16:42,398 - pynamics.system - INFO - integration at time 0007.98
2021-03-08 16:16:42,615 - pynamics.system - INFO - integration at time 0008.79
2021-03-08 16:16:42,832 - pynamics.system - INFO - integration at time 0009.42
2021-03-08 16:16:43,050 - pynamics.system - INFO - integration at time 0009.94
2021-03-08 16:16:43,066 - pynamics.integration - INFO - finished integration
2021-03-08 16:16:43,073 - pynamics.output - INFO - calculating outputs
2021-03-08 16:16:43,077 - pynamics.output - INFO - done calculating outputs
2021-03-08 16:16:43,079 - pynamics.integration - INFO - beginning integration
2021-03-08 16:16:43,286 - pynamics.system - INFO - integration at time 0007.66
2021-03-08 16:16:43,342 - pynamics.integration - INFO - finished integration
2021-03-08 16:16:43,348 - pynamics.output - INFO - calculating outputs
2021-03-08 16:16:43,353 - pynamics.output - INFO - done calculating outputs
<AxesSubplot:>




from matplotlib import animation, rc
from IPython.display import HTML
HTML(po.anim.to_html5_video())
HTML(po2.anim.to_html5_video())
HTML(po3.anim.to_html5_video())